
Полное меню
- Актуальное
законодательство - Интернет
и право- - Рассылка ''Закон есть закон''
- - Форум сайта (архив)
- - Законодательство
- - Судебная практика (необычная)
- - Судебная практика (авторская)
- - Процедура UDRP и и решения WIPO
- - Книги серии ''Интернет и Право''
- - Книги в открытом доступе
- - Учебный курс ''Интернет и Право''
- - Учебный курс ''Доменные споры''
- - Литература по ''Интернет и Право''
- - Литература по интел. собственности
- - Научный уголок (работы гостей)
- - Авторские публикации
- Информационные
материалы - ЮРИДИЧЕСКИЕ
УСЛУГИ- - Перечень юридических услуг
- - Карта юридических услуг
- - Юридическая консультация
- - Доменные споры (RU), авторское право
- - Международный суд по доменам (COM)
- - Защита прав на маркетплейсе (WB, Ozon)
- - Защита прав в соцсетях (Vk, Ok, FB)
- - Купля-продажа домена, сайта, ПО
- - Досудебное урегулирование конфликта
- - Защита чести и деловой репутации
- - Отмена блокировки сайта/домена РКН
- - ФАС: товарные знаки, авторское право
- - Регистрация ПО/сайта (Роспатент)
- - Юридическая проверка домена
- - Нотариальное заверение сайтов
- - Способы и формы оплаты услуг
- - Мы в СМИ
- - О компании, клиенты
- - Наши дела и победы
- - Контакты и реквизиты
- Информация
о сайте -






Основные ссылкиНа правах рекламы: 
Произвольная ссылка: |
Вернуться в "Каталог СНиП"Руководство Руководство по применению фотограмметрических методов для составления обмерных чертежей инженерных сооружений.ПРОИЗВОДСТВЕННЫЙ И НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ ПО ИНЖЕНЕРНЫМ ИЗЫСКАНИЯМ В СТРОИТЕЛЬСТВЕ ПНИИИС Госстроя СССР РУКОВОДСТВО
Москва 1984 Приведены методы геодезических, фотосъемочных и фотограмметрических работ для составления обмерных чертежей инженерных сооружений. Для инженерно-технических работников проектных и изыскательских организаций. Рекомендовано к изданию секцией инженерной геодезии научно-технического совета ПНИИИС Госстроя СССР ПРЕДИСЛОВИЕ Руководство по применению фотограмметрических методов для составления обмерных чертежей инженерных сооружений разработано с целью установления единой технологии создания архитектурных планов инженерных сооружений и содержит рекомендации по составу и способу выполнения комплекса полевых и камеральных работ по наземной стереофотограмметрической (фототеодолитной) съемке. В основу Руководства положены возможности и преимущества наземной стереофотографической съемки, используемой в качестве основного способа при решении различных измерительных задач, встречающихся при проектировании, реконструкции и исследований инженерных сооружений. Руководство составлено по технологическому признаку выполнения работ, в нем отражены следующие основные вопросы: полевые геодезические и фотосъемочные работы; особенности камеральной обработки снимков сооружений на различных универсальных стереофотограмметрических приборах; аналитическая обработка снимков. В Руководстве нашел отражение отечественный и зарубежный опыт инженерной фотограмметрии, а также действующие нормативные и другие методические документы, регламентирующие порядок работ по наземной стереофотограмметрической съемке при инженерных изысканиях для строительства. Руководство подготовлено Киевским государственным университетом (проф. В.М. Сердюков, канд. техн. наук Г.А. Патыченко, инженеры В.А. Катушков, И.К. Шумилова, Б.П. Довгий, Г.М. Хихлуха) и Производственным и научно-исследовательским институтом по инженерным изысканиям в строительстве (ПНИИИС) Госстроя СССР (канд. техн. наук В.К. Львов, инженеры А.А. Тинт, Н.П. Калинин, Т.С. Белоцерковская). 1. ОБЩИЕ ПОЛОЖЕНИЯОбщие требования к выполнению архитектурно-строительных обмеров1.1. Одной из основных задач фотограмметрии в архитектуре является выполнение архитектурно-строительных обмеров с целью реконструкции и реставрации зданий, а также в научно-исследовательских целях. В зависимости от назначения архитектурно-строительные обмеры подразделяются на схематические, архитектурные и архитектурно-археологические. 1.2. Схематические обмеры выполняются для общего обзорного представления сооружений и архитектурных ансамблей. Архитектурные обмеры выполняются для разработки проектов реставрационных работ и реконструкции. Архитектурно-археологические обмеры выполняются для разработки проектов реставрации с одновременным натурным исследованием сооружения и фиксацией состояния памятника. 1.3. Масштабы обмерных чертежей, планов и отдельных фрагментов, требования к полноте и точности их составления определяются в техническом задании в зависимости от назначения архитектурно-строительных обмеров. 1.4. Исходя из технических возможностей современной технологии фотограмметрических методов съемки устанавливается следующая классификация точностей выполнения обмерных работ. При создании фотопланов фасадов зданий, составляемых для обзорных целей, допускаются перспективные смещения второстепенных деталей (карнизов, балконов), превышающие допуски, приведенные в табл. 1. Таблица 1
Прецизионные измерения I класса точности выполняются только аналитическим методом с указанием на чертежах размеров всех необходимых деталей. Для разработки технических проектов реставрации крупных архитектурных ансамблей обмерные чертежи составляются в масштабах 1:100 и 1:200. Для выполнения обмерных работ на стации рабочих чертежей планы сооружений составляются в масштабах 1:20, 1:50. Обмерные чертежи отдельных фрагментов составляются в масштабе 1:10 или 1:5. Технологические варианты выполнения обмеров фотограмметрическим методом1.5. Методом фотограмметрии архитектурные обмеры можно выполнять путем измерения: одиночных снимков; пары снимков. 1.6. Методом измерения одиночных снимков можно выполнять обмеры сооружений, состоящих главным образом из плоских элементов с крупными формами. В зависимости от заданной точности работ, их назначения и имеющихся фотограмметрических приборов архитектурные обмеры по одиночным снимкам можно выполнять различными камеральными методами обработки снимков: фототрансформированием; оптико-графические; аналитическим; графическим. 1.7. Методом фототрансформирования могут составляться фотопланы фасадов зданий, интерьера, памятников в заданном масштабе. При необходимости составления чертежных планов контуры фотоплана вычерчиваются тушью, а фотоизображение отбеливается. Фототрансформирование выполняется на фототрансформаторах ФТБ, ФТМ, «Ректимат» и др. Оптико-графический метод заключается в том, что контуры трансформированного изображения обводятся карандашом и сразу получается чертежный план в заданном масштабе. Обычно при оптико-графическом трансформировании используются одиночные проекторы, имеющие формат прикладной рамки 8×6 см. Поэтому при больших, форматах снимков с них следует изготовлять уменьшенные диапозитивы. Оптико-графическое трансформирование можно выполнять и с использованием фототрансформаторов. Метод оптико-графического трансформирования технологически более прост, чем метод трансформирования, но имеет меньшую производительность и создает затруднения при контроле чертежей. Аналитический метод заключается в вычислении координат точек с использованием формулы связи координат одиночного снимка и объекта. Снимки измеряются на стереокомпараторах, вычисления целесообразно выполнять на ЭВМ. Аналитическим методом по измерениям одиночных снимков можно определить главным образом размеры между точками, лежащими в одной плоскости, что ограничивает возможности метода. Графический метод заключается в составлении чертежного плана с использованием приемов начертательной геометрии и свойств изображения в центральной проекции. Графический метод имеет меньшую точность, чем остальные, и малопроизводителен. 1.8. Методом измерения пары снимков можно определять размеры между любыми точками сооружения, расположенными в различных плоскостях. Этот метод имеет наибольшие возможности для выполнения архитектурных обмеров. Необходимым условием этого метода является наличие снимков, полученных с разных точек. Снимки могут быть получены одним фотоаппаратом или разными фотоаппаратами. Снимки могут составлять стереопару (т.е. по снимкам можно наблюдать стереоэффект), и можно использовать пару снимков, по которым нельзя получить стереоэффект (обычно архивные снимки). Пара снимков может обрабатываться методами: универсальным; аналитическим. 1.9. При обработке снимков универсальным методом необходимо иметь снимки, составляющие стереопару и подученные одним фототеодолитом. Снимки стереопары обрабатываются (измеряются) на универсальных приборах: стереопроекторе, стереографе, стереоавтографе и др. При использовании приборов, у которых фокусное расстояние проектирующих камер устанавливается независимо один от другого (стереограф, стереоавтограф и др.), можно использовать стереопару снимков, полученных разными фотокамерами. В результате обработки снимков на универсальных приборах получается чертежный план фасада сооружения в заданном масштабе. На универсальных приборах можно определять и координаты точек, расстояния между точками, высоту конструктивных элементов сооружения. Такой метод определения размеров получил название аналого-аналитического. Универсальный метод имеет наибольшие возможности для архитектурных обмеров. При аналитическом методе снимки измеряются на стереокомпараторах или монокомпараторах. Снимки могут составлять стереопару, и могут использоваться снимки, по которым нельзя получить стереоэффект, но такие снимки должны иметь перекрытие, т.е. на них должны быть изображены общие детали сооружения. Аналитический метод основан на использовании математических зависимостей между координатами пары снимков и объекта. В результате аполитической обработки получается цифровая модель сооружения (координаты X, Y, Z отдельных точек), пользуясь которой можно определить размеры между любыми точками, составить графический план. Наиболее удобно составлять чертежные планы с использованием автоматических координатографов и графопостроителей. Архитектурные обмеры могут выполняться и комбинированными методами, когда используются различные методы, например метод фототрансформирования и аналитический и т.д. Кроме этого, в ряде случаев возникает необходимость досъемки невидимых деталей («мертвых мест») путем натурных измерений или использования малоформатных камер. Приборы для полевых и камеральных работПриборы для полевых работ1.10. Полевые работы при наземной стереофотограмметрической съемке местности выполняются с помощью фототеодолита или специальных фотокамер. 1.11. В настоящее время имеется много типов фототеодолиты, которые можно классифицировать по формату кадра (6×9, 10×15, 13×18, 18×24 см), по углу поля зрения, фокусному расстоянию и другим характеристикам. Комплект фототеодолита состоит из фотокамеры, теодолита, дальномерного устройства, штативов, кассет и других принадлежностей. Наиболее широко у нас применяются фототеодолиты формата 13×18 см с фокусным расстоянием около 200 мм, как, например, фототеодолиты «Геодезия» (СССР), фирмы «Цейсс» (ГДР) С-3в, С-5в, ТАН, «Фотео-19/1318» и др. Фототеодолит «Фотео-19/1318» с фокусным расстоянием f = 19 см, со снимком размером 13×18 см в настоящее время широко применяется в нашей стране для наземной стереофотограмметрической съемки местности и для специальных инженерных целей. 1.12. Особую группу составляют стереофотограмметрические камеры, позволяющие выполнять одновременное фотографирование объекта. Такие камеры обычно используются для специальных инженерных съемок с близких расстояний. Обычно у фототеодолитов, предназначенных для топографических съемок, прикладную рамку устанавливают в фокальной плоскости объектива, что соответствует резкости изображения при наведении на бесконечность. При съемке с близких расстояний для фокусировки необходимо было бы перемещать объектив. Для придания жесткости фотокамере, упрощения ее конструкции и сохранения элементов внутреннего ориентирования объектив не имеет перемещений для фокусировки, поэтому при съемке таким теодолитом с близких расстояний возникает нерезкость изображения. В этих случаях следует или применять специальные фотокамеры с выдвигающимися объективами, или реконструировать существующие, вводя в них удлиняющие тубусы. Приборы для камеральных работ1.13. Камеральная обработка материалов фототеодолитной съемки может производиться аналитическим, графическим и графомеханическим методами. При аналитическом и графическом методах сначала измеряют координаты точек снимков на стереокомпараторе для определения координат точек x, z и продольного параллакса p. Наиболее распространены в Советском Союзе отечественный стереокомпаратор СК-2 и стереокомпаратор 1818 фирмы «Цейсс» (ГДР). Часто вместо стереокомпараторов используются прецизионные стереометры СМ-3 и СМ2-4 конструкции проф. Ф.В. Дробышева. В настоящее время получают распространение стереокомпараторы с автоматической регистрацией результатов измерений на перфокартах, перфоленте или с помощью электрической пишущей машины. К ним относится стекометр фирмы «Цейсс» (ГДР), высокоточный стереокомпаратор СКВ-1, разработанный в ЦНИИГАиК, и др. 1.14. Графомеханический метод заключается в обработке снимков на специальных стереофотограмметрических приборах - стереоавтографах или на универсальных приборах типа стереопланиграфа. Этот метод применяется для составления карт, а также чертежей инженерных сооружений и имеет наиболее высокую производительность. В Советском Союзе имеются стереоавтографы фирмы «Орель-Цейсс», малый автограф фирмы «Цейсс», стереоавтограф проф. Ф.В. Дробышева. Наибольшее распространение получил, стереоавтограф 1318 фирмы «Цейсс» (ГДР). Стереоавтограф и стереопланиграф позволяют по фототеодолитным снимкам рисовать ситуацию, горизонтали, определять отметки точек и их плановое расположение. Кроме того, благодаря переключению координатных осей стереоавтографа можно строить продольные и поперечные профили, проекцию на фронтальную и боковую плоскости, в чем возникает необходимость при инженерной фотограмметрии. При помощи стереоавтографа, стереопланиграфа и других универсальных приборов можно составлять по фототеодолитным снимкам чертежи инженерных сооружений, архитектурных памятников и т.д. 2. ТЕХНИЧЕСКИЕ ОСНОВЫ ФОТОТЕОДОЛИТНОЙ СЪЕМКИ СООРУЖЕНИЙОсновные понятия и определения2.1. При инженерных съемках и исследованиях зданий и сооружений применяют фототеодолитную съемку. Фотографирование выполняется при помощи специальных фотокамер, снабженных ориентирным устройством и уровнями, что позволяет устанавливать фотокамеру в необходимое положение. Фотокамера фототеодолита состоит из объектива, корпуса и прикладной рамки, к которой прижимается фотопластинка в момент съемки. На прикладной рамке фотокамеры имеются две пары координатных меток xx и zz, которые при фотографировании изображаются на снимках. Координатные метки установлены таким образом, что соединяющие их прямые взаимно перпендикулярны. В некоторых случаях для съемок сооружений применяют любительские фотоаппараты и киноаппараты. 2.2. В инженерной фотограмметрии применяется фотограмметрический метод, когда для измерительных целей используют одиночные снимки, и стереофотограмметрический, когда задача решается по результатам измерений стереопары. Фотограмметрический метод съемки применяют для определения положения точек сооружения в плоскости, параллельно которой устанавливается плоскость снимка. Съемку выполняют с одной фотостанции. Если объект фотографируется несколько раз (например, для определения деформаций), то такую съемку называют съемкой с нулевым базисом. Стереофотограмметрический метод используют в тех случаях, когда необходимо определить пространственное положение точек сооружения по осям XYZ. В этом случае съемку производят с двух точек, расстояние между которыми называется базисом фотографирования. Обычно фотографирование производится с горизонтального базиса. При исследовании сооружений иногда возникает необходимость фотографирования с вертикального базиса, когда одна фотостанция находится над другой. Системы координат2.3. При фототеодолитной съемке различают три основные системы координат: плоскую прямоугольную систему координат снимка xz. За начало координат здесь принимается точка О - точка пересечения осей xx и zz снимка; пространственную прямоугольную фотограмметрическую систему координат XYZ. За начало координат принимается передняя узловая точка объектива S при установке фототеодолита на левом конце базиса фотографирования. Ось Z обычно занимает вертикальное положение, а оси X и Y могут занимать различное положение в зависимости от условий съемки и удобства выполнения математической обработки результатов измерений (рис. 1). При фотограмметрических измерениях применяется правая система пространственных координат; пространственную прямоугольную геодезическую систему координат Xr, Yr, Zr, которая может быть государственной или условной и в общем случае не совпадать с фотограмметрической.
Рис. 1. Система пространственных фотограмметрических координат Геодезические координаты точек объекта получают путем перевычисления фотограмметрических пространственных координат в соответствии с правилами переноса и поворота координатных осей. При определении взаимного положения точек сооружений определяют только фотограмметрические координаты, не переходя от них к геодезическим. Элементы ориентирования2.4. Для определения координат точек объекта по снимкам необходимо знать элементы ориентирования, которые определяют положение снимков в пространстве в момент съемки. Их разделяют на две группы - внутреннего и внешнего ориентирования. 2.5. Элементы внутреннего ориентирования определяют положение центра проекции относительно снимка. К ним относятся фокусное расстояние f фотокамеры и координаты x0 и z0 главной точки O' снимка (рис. 2). Фокусным расстоянием фотокамеры называется расстояние между узловой точкой объектива Sz' плоскостью снимка (плоскостью прикладной рамки фотокамеры). Главным лучом называется проектирующий луч S'O, перпендикулярный плоскости снимка.
Рис. 2. Элементы внутреннего ориентирования снимков Обычно при изготовлении фотокамеры стремятся установить объектив так, чтобы оптическая ось объектива была перпендикулярна плоскости снимка (плоскости прикладной рамки), т.е. чтобы оптическая ось фотокамеры совпадала с главным лучом фотокамеры. Поэтому часто главный луч фотокамеры называют оптической осью фотокамеры. Главной точкой снимка называется точка пересечения главного луча с плоскостью снимка. Координатные метки xx, zz прикладной рамки при изготовлении фотокамеры стремятся установить так, чтобы главная точка O' снимка совпадала с началом координат на снимке (с точкой пересечения линий, соединяющих координатные метки xx, zz). Однако вследствие недостаточно точной установки координатных меток главная точка снимка O' не совпадает с началом координат снимка - точкой O - на величину x0, z0. В процессе юстировки фотокамеры стремятся уменьшить величины x0, z0 по минимума, поэтому координатные метки обычно изготовляют перемещающимися. При аналитической обработке результатов измерений несовпадение главной точки снимка с началом координат можно учесть введением соответствующих поправок, поэтому положение координатных меток можно не исправлять, а иногда можно и не определять положение главной точки (т.е. не определять значение величин x0, z0). 2.6. Элементы внешнего ориентирования определяют положение фотокамеры относительно принятой пространственной системы координат. Положение снимка в пространстве определяется шестью параметрами, из которых три линейные и три угловые величины. Линейными элементами внешнего ориентирования являются координаты центра проекции XS, YS, ZS. Координаты центра проекции определяют в геодезической, условной или пространственной фотограмметрической системе координат. Угловые элементы внешнего ориентирования могут в зависимости от принятой системы ориентирования иметь разный вид. В качестве угловых элементов внешнего ориентирования могут быть взяты (см. рис. 1): α - угол вращения снимка в горизонтальной плоскости вокруг оси Z; ω - угол наклона снимка (угол вращения снимка вокруг оси X), χ - угол крена снимка (угол вращения снимка в своей плоскости вокруг оптической оси фотокамеры). Угловыми элементами внешнего ориентирования могут быть также дирекционный угол направления оптической оси фотокамеры AO, угол наклона оптической оси ω и угол поворота (крена) снимка в своей плоскости χ. Разница между углами α и A0 заключается в том, что угол α отсчитывается от положительного направления оси Y пространственной фотограмметрической системы координат, а A0 - от положительного направления оси Xi геодезической системы координат. 2.7. Если имеется пара снимков и фотографирование выполняется одной и той же камерой, то считается, что элементы внутреннего ориентирования одинаковы. Следовательно, положение пары снимков в пространстве определяется 15 элементами, из которых 3 элемента внутреннего ориентирования и 12 - внешнего. Однако вследствие неприжима фотопластинки к плоскости прикладной рамки фотокамеры изменяются элементы внутреннего ориентирования, и поэтому в общем случае можно считать, что положение пары снимков определяется 18 элементами ориентирования. Обычно для стереопары фототеодолита снимков выбирают систему элементов внешнего ориентирования, исключающую координаты правого конца базиса (центра проекции фотокамеры при установке на правом конце базиса). В этом случае элементами внешнего ориентирования будут: XSA, YSA, ZSA - координаты левого центра проекции; A - дирекционный угол базиса; ψ - горизонтальный угол между базисом и оптической осью левой фотокамеры; ωA - угол наклона оптической оси фотокамеры на левом конце базиса; χ - угол поворота (крена) левого снимка; B - горизонтальное положение базиса; Bz - превышение правого конца базиса относительно левого; γ - угол конвергенции (горизонтальный угол между оптическими осями фотокамеры при установке на левом и правом концах базиса); ωП - угол наклона оптической оси фотокамеры на правом конце базиса; χП - угол поворота правого снимка. Выбор такой системы обусловлен тем, что эти величины обычно определяются при фототеодолитной съемке. Основные случаи съемки2.8. При съемке оптическая ось фотокамеры может занимать различное положение относительно горизонта и линии базиса. В зависимости от принятых угловых элементов внешнего ориентирования различают пять основных случаев съемок: нормальный, равноотклоненный, конвергентный, равнонаклоненный и общий. При нормальном случае съемки (рис. 3,а) оптические оси левой и правой фотокамер устанавливаются горизонтально и перпендикулярно базису B, плоскость снимка занимает отвесное положение. Нормальный случай съемки применяется чаще, так как он обеспечивает наиболее точные результаты и упрощает математическую обработку. При равномерно отклоненном случае съемки оптические оси левой и правой фотокамер отклоняются вправо или влево на один и тот же угол α для расширения горизонтального угла охвата снимаемого объекта (рис. 3,б, в). В результате этого с одного базиса можно получить три стереоскопические пары снимков: стереопару для нормального случая съемки, стереопары со скосом влево и вправо.
Рис. 3. Основные случаи съемки При конвергентном случае съемки оптические оси левого и правого снимков пересекаются под углом γ (рис. 3,г). При равномерно наклоненном случае съемки оптические оси левой и правой фотокамер наклонены на один и тот же угол ω; этот случай применяется при съемке высоких сооружений. При общем случае съемки положение оптических осей фотокамеры может быть произвольным. Наибольшее применение в практике имеют нормальный и равномерно отклоненный случаи съемки. Остальные случаи используют редко - главным образом при определении координат отдельных точек аналитическим методом, когда основные способы съемок по тем или иным обстоятельствам не обеспечивают решение задачи. Основные формулы фототеодолитной съемки 2.9. К основным формулам фототеодолитной съемки относятся формулы связи координат точек снимка и местности при нормальном и равномерно отклоненном случаях съемки. 2.10. При нормальном случае съемки пространственные координаты точек объекта при стереофотограмметрических измерениях по стереопаре снимков определяют по формулам:
где В - базис фотографирования; f - фокусное расстояние фотокамеры; p = xл - xп - продольный параллакс определяемой точки; x, z - координаты определяемой точки на левом снимке. 2.11. Для равномерно отклоненного случая съемки, когда за ось Y принято направление оптической оси камеры, связь координат точек снимка и объекта выражается формулами:
где α - угол отклонения оптической оси от перпендикуляра к базису (см. рис. 3,б). 2.12. При нормальном случае съемки с равномерно наклоненными осями пространственные, координаты вычисляют по формулам:
2.13. Вид формул для определения пространственных фото грамметрических координат может изменяться в зависимости от принятой пространственной фотограмметрической системы координат X, Y, Z. В пространственной системе координат за начало координат обычно принимается центр проекции левого снимка. Направление осей X и Y принимается горизонтальным. За положительное направление оси Y принимаются: направление, параллельное оси X геодезической системы (рис. 4,а); направление, перпендикулярное базису (рис. 4,б); направление оптической оси (горизонтальное положение) левого снимка (рис. 4,в). Кроме этих направлений могут быть выбраны и другие, однако все формулы для определения пространственных координат при других выбранных положительных направлениях оси Y фотограмметрической системы могут быть получены путем замены в соответствующих формулах первых трех систем X на Y или X на Z и наоборот. Таким образом, практически применяют только формулы для первых трех выбранных направлений для положительной оси Y фотограмметрической системы координат.
Рис. 4. Пространственные фотограмметрические системы координат 2.14. Переход от пространственной фотограмметрической системы координат к геодезической выполняется по формулам: XГ = XSЛ + YcosA - XsinA; (10) YГ = YSЛ + YsinA + XcosA; (11) ZГ = ZSЛ + Z + (k + r), (12) где XSЛ, YSЛ, ZSЛ - геодезические координаты левого центра проекции; A - дирекционный угол оси Y фотограмметрической системы координат; k + r - поправка на кривизну Земли и рефракцию. При инженерных съемках сооружений поправку k + r не учитывают, так как она мала или как постоянная величина при примерно одинаковых отстояниях Y войдет составной частью в поправку за нарушение элементов ориентирования. 2.15. Все формулы для определения пространственных фотограмметрических координат можно обобщить и привести к виду, аналогичному для нормального случая съемки:
В формулах (13) - (15) трансформированные значения xt, zt, pt определяются по формулам:
pt = xЛt - xПt; (18)
где ai, bi, ci - направляющие косинусы между координатными осями снимка x, y(f), z и координатными осями трансформированного снимка; ψ = 90° - (αЛ - φЛ) - угол поворота оси X пространственной фотограмметрической системы координат относительно базиса. Направляющие косинусы определяются по формулам: a1 = cosα·cosχ - sinω·sinα·sinχ; a2 = sinα·cosω; a3 = -cosα·sinχ - sinα·sinω·sinχ; b1 = -sinα·cosχ - cosα·sinω·sinχ; b2 = cosα·cosω; b3 = sinα·sinχ - cosα·sinω·cosχ; с1 = cosω·sinχ; с2 = sinω; с3 = cosω·cosχ; где α, ω, χ - углы внешнего ориентирования относительно принятой системы пространственных фотограмметрических координат. Точность фототеодолитной съемки2.16. Точность определения пространственных координат точек объекта зависит в основном от погрешностей измерений снимков, геометрических искажений изображения, погрешностей определения элементов внутреннего и внешнего ориентирования снимков, способа обработки результатов измерений, применяемого случая съемки (нормальный, равномерно отклоненный и т.п.), величины базиса и расположения точек относительно фотостанций. 2.17. При стереофотограмметрической съемке для нормального случая средние квадратические погрешности определения пространственных координат на основании формул (1) - (3) будут определяться по формулам:
где mB - средняя квадратическая погрешность измерения базиса фотографирования; mf - средняя квадратическая погрешность определения фокусного расстояния фототеодолита; mp, mx, mz - средние квадратические погрешности измерения продольного параллакса к координат точек снимка. При приближенных расчетах можно принять:
2.18. При равномерно отклоненном случае съемки средние квадратические погрешности определения пространственных координат определяются по формулам:
или при приближенных расчетах:
Таким образом, при равномерно отклоненном случае съемки погрешности в определении X, Y, Z, зависящие от mp, увеличиваются в 1/cosα раз. Следовательно, нормальный случай при всех прочих равных условиях имеет большую точность, чем равномерно отклоненный. 3. СОСТАВЛЕНИЕ ТЕХНИЧЕСКОГО ПРОЕКТАВыбор метода камеральной обработки снимков3.1. Выбор метода съемки определяется техническим заданием, содержащим требования к точности измерений, масштабом составляемого плана и наличием фотограмметрических приборов. При съемке сооружения, состоящего из крупных плоских элементов, целесообразно использовать метод фототрансформирования как наиболее простой и производительный. При необходимости получения графического плана фасада здания или отдельных его элементов фотоплан дешифрируется с вычерчиванием всех элементов тушью, после чего фотоизображение отбеливается. При съемке сложных сооружений применяется универсальный метод с составлением графического плана на приборах. При необходимости получения фотоплана применяется метод дифференциального трансформирования с использованием ортофототрансформаторов. Для получения значительного количества координат точек с повышенной точностью используется аналого-аналитический метод. При большом объеме вычисления обработка результатов измерений выполняется по соответствующей программе на ЭВМ. 3.2. Точность фотограмметрических работ зависит от применяемых параметров съемки (отстояние Y, базис съемки В, вид съемки, фокусное расстояние фотокамеры f, формат кадра), точности измерения снимков, введения поправок за нарушение элементов внешнего и внутреннего ориентирования и т.п. Поэтому при полевых работах следует принимать оптимальные параметры съемки, обеспечивающие максимальную точность, а при камеральных работах применять методику, обеспечивающую введение поправок за нарушение элементов ориентирования с погрешностью, не превышающей точности измерения снимков. В ряде случаев для получения заданной точности работ приходится выполнять многократную съемку (5 - 10 снимков и более) сооружений и измерять снимки двумя приемами. Большое значение для повышения точности фотограмметрических работ имеет точность определения координат центров проекций фотокамер и контрольных точек, а также их количество и расположение на сооружении. При съемке сооружений отстояние Y определяется заданной точностью определения координат, габаритами сооружения, возможностью расположения базиса фотографирования. При этом необходимо учитывать диапазоны соответствующих движении стереофотограмметрических приборов при камеральной обработке снимков аналого-аналитическим методом. 3.3. Максимальное значение базиса Bмакс при съемке местности исходя из возможностей получения стереоэффекта для точек ближнего плана не должно превышать
и соответственно продольный параллакс pмакс не должен превышать
Однако при съемках сооружений, когда объект съемки близок к плоскости, стереоэффект возникает и при большем значении базиса, или, что то же самое, при большем значении параллакса. С увеличением базиса при неизменном отстоянии увеличивается точность определения отстояния, но уменьшается величина перекрытий стереопар и тем самым увеличивается протяженность снимаемой части объекта, а следовательно, увеличивается и продвиг работ. Поэтому при стереофотограмметрической съемке зданий возникает необходимость отыскания оптимальной величины базиса съемки и отстояния, обеспечивающих заданную точность определения координат при наибольшем продвиге работ. Наиболее точные результаты при наибольшем продвиге работ будут получены при оптимальном значении коэффициента съемки Kопт:
где l - полезный размер кадра по оси; xмакс - максимально возможное значение абсциссы на снимке. Для фототеодолитов с прикладной рамкой размером 13×18 см и фокусным расстоянием 200 мм Kопт ≈ 2,5; при f = 100 мм Kопт = 1,3. При выбранном оптимальном значении продольного параллакса pопт предельное значение отстояния Yмакс, обеспечивающее получение заданной точности при максимальном продвиге работ, будет равно:
и значение базиса съемки найдется на основании (1) и (35):
Поскольку pопт = X,
Таким образом, оптимальная длина базиса будет равна заданной протяженности сооружения по оси X (рис. 5). Для фототеодолита «Фотео 19/1318» с f = 195 мм, xмакс = 80 мм значения Bопт и Yмакс будут равны:
3.4. В отдельных случаях может встретиться необходимость применить съемку с увеличением против оптимального значения базисов B > Bопт, в этом случае p > Xмакс. Большие значения коэффициента съемки возникают при применении короткофокусных фототеодолитов. Так, при использовании универсальной измерительной камеры «UMK 10/1318» коэффициент съемки при оптимальных условиях достигает величины
и максимальное значение отстояния равно: Yмакс = Kопт·Bопт = 1,3Bопт. (41)
Рис. 5. Расположение фотостанций при выполнении оптимальных условий съемки Опыт работ показывает, что съемка объектов строительства при выполнении оптимальных условий обладает рядом преимуществ, особенно при съемке крупных сооружений, когда значительно уменьшается объем полевых и камеральных работ. Съемку при не оптимальных условиях (K > Kопт) можно выполнять при съемке небольших сооружений, при определении координат точек в плоскости x, z при съемке в условиях, когда ограничена возможность выбора нужных отстояний и базисов. Применение длиннофокусных фототеодолитов оправдано только при повышенном требовании к точности определения координат X, Z в случае, если отстояния уменьшить нельзя. При съемке крупных и высоких сооружений целесообразно применять фотокамеры большого формата, чтобы при одинаковых фокусных расстояниях с фотокамерой меньшего формата увеличить захват сооружения по высоте и ширине (при увеличении точности определения координат Y) примерно пропорционально увеличению формата кадра. При одинаковом продвиге работ, т.е. при одинаковом захвате сооружения по высоте и ширине, точность определения координат X, Z повышается пропорционально квадрату увеличения формата кадра, а точность определения отстояния - пропорционально квадрату увеличения формата кадра по оси X. 3.5. При съемке высоких сооружений следует рассчитывать минимальное значение отстояния, при котором будет обеспечен захват здания по высоте
где Zмакс - высота сооружения относительно фотокамеры; zмакс - максимальное значение аппликаты на снимке. Для увеличения аппликаты z съемка высоких сооружений выполняется при верхнем положении объектива у фототеодолитов с перемещающимся объективом и фототеодолитов с несколькими объективами. Если в натуре отстояние Y окажется меньше рассчитанного по формуле (42) значения Yмин, то съемку следует выполнять с более высоких точек или при наклонном положении оптической оси. Если окажется, что рассчитанное по формуле (35) значение будет меньше Yмин, определенного по формуле (42), то следует увеличить точность определения продольного параллакса mp, и координат mx, mz точек на снимке. Увеличение точности достигается увеличением количества приемов измерений снимков на стереокомпараторе и увеличением числа снимков. Число приемов измерений одного снимка обычно устанавливается 2 - 3, а количество снимков может быть доведено до 6 - 12. В любом случае для получения контроля количество снимков не должно быть меньше 2 - 3 с каждой фотостанции. 3.6. Если в задачу работ входит определение только координат X, Z, то максимально допустимое отстояние Yмакс устанавливается исходя из заданной точности их определения:
Значения mp, mx, mz, входящие в формулы (34) - (42), в зависимости от типа фотокамеры, измерительного прибора, качества фотопластинки могут колебаться от 0,005 до 0,02 мм. Для средних условий при измерениях по маркированным точкам их расчетные значения можно принимать равными mp = mx = mz = 0,02 мм при измерениях на универсальных приборах и равными mp = mx = mz = 0,015 мм при измерениях на стереокомпараторе. Предельные значения отстояний с учетом погрешности измерения снимков и оптимальных параметров съемки приведены в табл. 2. Составление технического проекта работ3.7. Технический проект является основным документом, регламентирующим технические требования, технологическую последовательность и методику выполнения работ с учетом конкретных условий, существующих в районе расположения памятника архитектуры. В техническом проекте отображаются все виды полевых и камеральных работ, подлежащих выполнению в соответствии с выбранным методом производства архитектурно-строительных обмеров. Таблица 2
Составление технического проекта производится на основании технического задания, выдаваемого заказчиком, результатов сбора и изучения материалов и сведений о памятнике архитектуры и районе его расположения и решения о выборе метода выполнения архитектурно-строительных обмеров. 3.8. Техническое задание должно содержать сведения о местоположении памятника архитектуры, целевом назначении архитектурно-строительных обмеров, и стации проектирования. В задании с указанием примерных размеров перечисляются фасады, интерьеры и фрагменты памятника архитектуры, планы которых должны быть составлены в результате обмерных работ, указываются масштабы составляемых планов, местоположение горизонтальных и вертикальных разрезов, очередность и сроки сдачи материалов, особые требования к работам и содержанию материалов. Техническое задание дополняется графическими приложениями, дающими наглядное представление о снимаемых фасадах, местах расположения разрезов и фрагментов. 3.9. Технический проект по своему содержанию должен состоять из текстовой части и приложений. В текстовой части приводятся общие сведения о предстоящих работах (цель выполнения работ, масштабы создаваемых планов, объемы и стоимость работ), описание местоположения памятника архитектуры, определяются виды и методы геодезических работ по созданию опорной геодезической сети, технология выполнения полевых геодезических и фотосъемочных работ, камеральных работ по обработке материалов геодезических измерений и составлению планов фасадов и интерьеров, их разрезов и фрагментов. Устанавливается порядок контроля и приемки выполненных работ. Приводятся расчеты необходимого количества специалистов, оборудования, инструментов и материалов. В специальном разделе должны быть рассмотрены меры по обеспечению техники безопасности при производстве работ. Приводится перечень выпускаемых материалов. В виде приложений в состав технического проекта включаются схемы расположения памятника архитектуры, разрезов и фрагментов на его фасадах, схема проектируемых опорных геодезических сетей, схема расположения основных фотостанций с указанием расчетных величин базисов фотографирования и отстояний, чертежи центров геодезической сети и маркировочных знаков и копия технического задания. При выполнении архитектурно-строительных обмеров отдельных фасадов или их фрагментов вместо технического проекта составляются краткие технические указания по производству полевых и камеральных работ. Технический проект утверждается руководством организации, выполняющей архитектурно-строительные обмеры, после чего он согласовывается с заказчиком. Подготовка инструментов и приборов3.10. Для выполнения полевых геодезических работ подготавливаются следующие инструменты: оптические теодолиты Т5, Т5К, «Тео-020», «ТЕО-030»; нивелиры Н3 (НВ-1), НС3, СН4, НТ, -025, -050 и комплекты реек к ним; рулетки компарированные 5-, 10-, 20-, 50-метровые; оптические центриры; визирные марки; полевые журналы, вычислительная и чертежная бумага. Для выполнения фотосъемочных работ применяются: фототеодолитный комплект (фототеодолиты «Фотео 19/1318», С-3в, С-5в, «Геодезия», кассеты, штативы, подставки, рейка для измерения расстояний, юстировочное устройство, отвесы или оптические центры, визирные марки); универсальная измерительная камеры SMK-10/1318; стереофотограмметрическая камера SMK-5.5/0808; фотоэкспонометр; стереоскоп; фототеодолитные пластинки (контрастные или особоконтрастные, чувствительность 1 - 8 ед. ГОСТ 10691.1-73. 3.11. Для полевой фотолаборатории необходимо следующее оборудование: кюветы или специальные бачки для фотохимической обработки фотопластинок; стеклянная посуда для составления и хранения фотохимических растворов; весы аптекарские с разновесами; фонарь с красным светофильтром; термометры технические; химические реактивы для составления проявителя и закрепителя; фотографическая бумага размером 13×8 см для изготовления контактных отпечатков. 3.12. Для камеральной обработки снимков применяются следующие приборы: фототрансформаторы ФТБ, ФТМ, SEG-V, «Ректимат»; стереокомпараторы СКА-18, СКА-30, «Стекометр»; универсальные стереофотограмметрические приборы: стереопроектор СПР; стереограф СД; стереопланиграф; стереометрограф; стереотригомат; топокарт; стереоавтограф; приборы дифференциального трансформирования - ортофотопроектор ОФПД Дробышева. Перед началом полевых работ все приборы должны пройти тщательный осмотр и необходимый ремонт, после чего производятся их юстировка и компарирование. Упаковка инструментов, материалов и оборудования должна обеспечить их полную сохранность при транспортировке до района работ. 4. ПОЛЕВЫЕ ГЕОДЕЗИЧЕСКИЕ И ФОТОСЪЕМОЧНЫЕ РАБОТЫРекогносцировка объектов съемки4.1. Основная цель рекогносцировки - выявить необходимые изменения и внести дополнения в предварительный проект. В процессе выполнения рекогносцировки участка уточняют места расположения базисов фотографирования и контрольных точек, а также составляют схему геодезических определений базисных и контрольных точек. 4.2. При выборе базиса необходимо, чтобы с концов базиса были видны все необходимые точки сооружения. Выбранные места должны быть удобны для установки фототеодолита и дальномерной рейки на штативе. 4.3. Количество и расположение контрольных точек на сооружении зависит от точности обмерных работ, положения фотокамеры относительно основной плоскости сооружения и метода камеральных фотограмметрических работ. Опыт работ показал, что наиболее целесообразно контрольные точки располагать на вертикальных и горизонтальных линиях относительно одна другой (рис. 6).
Рис. 6. Расположение контрольных точек при архитектурно-строительных измерениях До съемки все контрольные точки маркируют. Необходимость маркировки контрольных точек, определяемых фотограмметрическим путем, устанавливают в процессе рекогносцировки: если объект фотографирования подставляет собой однообразный участок без характерных контуров (стена здания, балка или другой объект), то выбираемая на нем точка обязательно должна быть маркирована; если снимается объект с большим количеством характерных точек (окна, перекрытия, углы панелей), то контрольными точками могут служить эти детали. Минимальные размеры марок зависят от расстояния до базиса фотографирования и должны выбираться с таким расчетом, чтобы изображение марки на снимке имело размеры не менее 0,1×0,004 мм. Минимальные размеры марок подсчитывают по формуле
где r - вертикальный или горизонтальный размер марки в натуре, м; l - соответствующий размер изображения марки на снимке, мм; Y - отстояние от базисной точки до марки вдоль оптической оси камеры, м. 4.4. После окончания рекогносцировки закрепляют базисные точки и составляют схему, на которую наносят расположение базисов фотографирования с указанием длины каждого базиса, его порядкового номера и видов съемки, положение контрольных точек, определяемых как геодезическим, так и фотограмметрическим методом. Выполнение полевых геодезических работ по обоснованию фототеодолитной съемки4.5. Геодезические работы, выполняемые при фототеодолитной съемке, обычно состоят из: геодезического определения координат X, Y и отметок левых центров проекций фотокамер; определения дирекционных углов базисов фототеодолитных станций (АВ или ВА); определения дирекционных углов с левых точек базисов фототеодолитных станций на контрольные точки; геодезического измерения контрольных горизонтальных и вертикальных направлений; измерения длин базисов. 4.6. Требования к точности выполнения геодезических работ, зависящие от методики последующей камеральной обработки материалов, указаны в табл. 3. 4.7. Привязка фототеодолитных станций, не совмещенных с пунктами геодезических сетей, выполняется прямыми, обратными и комбинированными засечками, дальномерно-теодолитными ходами. Геодезическое определение точек базисов производится по программе в соответствии с техническим проектом; независимо от масштаба съемки наблюдения горизонтальных углов производятся двумя приемами, а вертикальных - одним приемом по средней нити. Дирекционные углы направления базиса определяют не менее чем по двум удаленным пунктам. Геодезическое измерение контрольных горизонтальных и вертикальных направлений обязательно должно производиться с обеих точек базиса фотографирования. Таблица 3
Измерение длины базиса фотографирования должно производиться с относительной ошибкой не ниже 1:1000. Измерения коротких (до 5 м) базисов можно выполнять компарированной рулеткой. В некоторых случаях базис может не измеряться, но при этом должны быть обязательно определены геодезические координаты левой станции базиса и стереопара должна быть обеспечена четырьмя контрольными точками. 4.8. Расположение контрольных точек на сооружении по вертикальным и горизонтальным линиям относительно одна другой значительно сокращают объем геодезических работ (см. рис. 6). Схемы рис. 6,а, б используются при составлении фронтального плана методом трансформирования и универсальным методом. Преимущество этих схем заключается в простоте геодезического определения: точки располагаются на одном уровне, а расстояния между ними измеряются рулеткой. Если точки располагаются не на одной горизонтальной линии, то разность их отметок определяется нивелированием или промером рулеткой. Схема рис. 6,а используется при съемке сооружений в случае горизонтального положения оси фотокамеры в измерениях V класса точности. Схема рис. 6,б используется при больших углах непараллельности между плоскостью снимка и фасадом сооружения при горизонтальной оптической оси фотокамеры и измерениях III и IV классов точности. Высота здания при таком расположении опорных точек не должна быть больше, чем расстояние между крайними контрольными точками. Схема рис. 6,в используется при любом методе камеральной обработки снимков и наклонных случаев съемки с обеспечением I и II классов точности измерений. Схему рис. 6,г следует использовать при аналитической обработке снимков для I класса точности измерений. 4.9. Контрольные точки можно определить различными способами, обеспечивающими приведенную в табл. 3 точность. Обычно координаты определяют прямой засечкой с линии базиса, координаты нижних точек - нивелированием, а верхних точек - промером рулеткой от нижних точек. Координаты Y можно определить промерами рулеткой от линии базиса. При геодезическом определении контрольных точек необходимо составлять абрис. Контрольные точки следует маркировать: это способствует повышению точности не только фотограмметрических, но и геодезических работ при определении их координат. Целесообразно также с этой целью маркировать и определяемые точки. Маркировочные знаки можно изготовлять на бумаге и приклеивать на сооружение. Форма маркировочного знака может быть различна. Наиболее просто изготовить крестообразный маркировочный знак, который обеспечивает высокую точность измерений и на снимке. Ширина луча маркировочного знака на снимке должна быть 0,03 - 0,05 мм, длина 0,1 - 0,2 мм. Размеры маркировочного знака можно рассчитать по известным параметрам съемки:
где X - ширина луча крестообразной марки; x - соответствующий размер измерительной марки стереоприбора. 4.10. Для повышения точности работ кроме уменьшения отстояния, увеличения базиса съемки при оптимальных параметрах служит наиболее полный учет поправок за изменение элементов внутреннего и внешнего ориентирования. В пределах стереопары должно быть намечено не менее четырех контрольных точек, располагающихся по углам стереопары (точки 1 - 4 на рис. 6). Если поправки за нарушение элементов ориентирования определяются по формулам:
то для четырех контрольных точек необходимо измерять и координаты x, z независимо от того, подлежат ли они определению при исполнительной съемке. Для дополнительных контрольных точек можно определять кроме отстояний y только координаты x если же определению подлежат только координаты z, то для дополнительных контрольных точек можно определять только координаты z. Если поправки за нарушение элементов ориентирования определяют с использованием уравнения поправок:
то кроме координат X для всех контрольных точек (которых должно быть не менее 5) дополнительно следует определять только координаты Z, если необходимо определить абсциссы точек сооружения, и только координаты Z, если они подлежат определению при исполнительной съемке. 4.11. Для фотостанций определяют координаты центра проекции ХS, YS, ZS в той же системе, что и контрольные точки. Координаты ХS определяют только в том случае, если необходимо знать координаты 2 точек сооружения. Координаты X - определяют простым промером по линии базиса, координаты ZS - путем нивелирования по миллиметровой линейке, которую приставляют нулем к координатной метке на прикладной рамке фототеодолита. Координаты Y определяют по формуле YS = YB - e, (49) где e - внецентренность передней узловой точки объектива (расстояние от вертикальной оси вращения фототеодолита до передней узловой точки объектива). Для фототеодолитов «Фотео 19/1318» e = 100 мм. 4.12. Базис фотографирования при съемке устанавливается параллельно основной продольной оси сооружения. Если съемка всего сооружения не может быть выполнена с одного базиса, то разбивается створная линия, на которой через расчетное значение длины базиса (формула 38) закрепляются точки стояния фототеодолитов. При оптимальных значениях базиса и отстояния правая фотостанция первого базиса будет левой фотостанцией второго базиса и т.д. (см. рис. 5). Такое расположение базисов и фотостанций обеспечивает наибольшую точность при наименьшем количестве фотостанций и снимков. Точность разбивки створа и параллельность линии базиса продольной оси сооружения должна быть выдержана с погрешностью, не превышающей (1/3)mY, если засечка контрольных точек на сооружении выполняется с нескольких базисных точек (более двух). Если засечка всех контрольных точек выполнена в единой системе координат, то разбивка створа и параллельность его оси сооружения может быть выдержана с погрешностью, превышающей допуск к определению координат X, Y, Z, поскольку остаточные погрешности, вызванные ошибками установки фотостанций, будут учтены поправками, определяемыми по контрольным точкам. Точность разбивки створа в этом случае может быть подсчитана по формуле
где ∆Y - глубина сооружения; x - максимальное значение координат x или p на снимке; δx - допустимое искажение координат, обусловленное погрешностью разбивки створа. Фотосъемочные работы и их особенности в зависимости от методов камеральной фотограмметрической обработки и применяемых фотограмметрических приборовФотосъемочные работы для составления фотопланов4.13. Если необходимо составить фотоплан плоского сооружения методом фототрансформирования, то створную линию следует разбивать исходя из допустимых углов непараллельности между плоскостью снимка и фасадом здания: где δzдоп - допустимое искажение на трансформированном снимке; K - коэффициент трансформирования; F - фокусное расстояние объектива фототрансформатора. Эту формулу можно использовать при трансформировании фототеодолитных снимков сооружений по двум точкам с использованием геометрической формы сооружения. Допустимые значения непараллельности αдоп для различных фотокамер и коэффициентов трансформирования, подсчитанные по формуле (51), приведены в табл. 4. Таблица 4
4.14. Установку параллельности плоскости прикладной рамки фотокамеры плоскости сооружения наиболее просто выполнить на матовом стекле путем оценки нарушения параллельности между горизонтальными линиями сооружения. Оценку удобно выполнить, используя сетку линий, прочерченных заранее на матовом стекле фотокамеры. Точность установки параллельности таким способом можно определить по формуле
где m∆z - ошибка определения равенства аппликат по изображению на матовом стекле; z - аппликата линии, по которой выполняется оценка параллельности; x - длина линии на матовом стекле. 4.15. При трансформировании по двум точкам на ФТМ без введения децентрации для определения допустимых углов непараллельности прикладной рамки фотокамеры и плоскости сооружения используется формула
Допустимые значения αдоп, подсчитанные в соответствии с формулой (53), приведены в табл. 5. Таблица 5
4.16. При составлении фронтальных планов методом фототрансформации необходимо учитывать предельные углы непараллельности, обусловленные возможностью трансформирования таких снимков на ФТБ и ФТМ. При коэффициентах трансформирования K > 1 предельные углы непараллельности не должны превышать значений, приведенных в табл. 6. Предельное отстояние съемки от фотокамеры до плоскости сооружения следует устанавливать исходя из возможного коэффициента увеличения на фототрансформаторе и заданного масштаба составляемого плана: Yпред = fMK. (54) Таблица 6
Фотосъемочные работы при обработке снимков на универсальных приборах4.17. Обработку снимков сложных архитектурных сооружений, имеющих значительное количество деталей, целесообразно выполнять на универсальных стереофотограмметрических приборах. Для этих целей применяются стереопланиграф, стереометрограф, стереопроектор, стереограф и др. Из них наиболее пригодным следует считать стереопланиграф, который позволяет обрабатывать снимки с наибольшими значениями углов α и ω и коэффициентом увеличения. Стереопроектор СПР и стереометрограф позволяют обрабатывать фототеодолитные снимки при f = 200 мм с углами наклона до 4°,5, а стереограф - до 3°, при f = 100 мм соответственно 5°,1 и 6°. Установку углов в пределах допуска можно осуществить путем разбивки базиса параллельно плоскости сооружения с точностью 2 - 3° и применения нормального случая съемки. 4.18. Если по условиям съемки не представляется возможным установить базис параллельно плоскости сооружения, то допустимая непараллельность не должна превышать значения, устанавливаемого по формуле
где b - среднее значение базиса в масштабе снимка; bz - максимальное значение базисного движения стереоприборов; M - знаменатель масштаба модели; m - знаменатель среднего масштаба снимка; K = m/M - коэффициент увеличения модели. Допустимые значения углов между базисом и плоскостью сооружения для фототеодолитной съемки с форматом фотопластинок 13×18 см приведены в табл. 7. Таблица 7
4.19. При съемке с базиса, непараллельного плоскости сооружения (угол непараллельности превышает данные табл. 7), фотокамеру следует установить так, чтобы угол между плоскостью снимка и плоскостью сооружения не превышал предельных углов наклона проектирующих камер универсального стереофотограмметрического прибора (табл. 8). При больших значениях непараллельности между базисом и плоскостью сооружения целесообразно выполнять съемку со скосом, причем угол скоса следует устанавливать равным углу непараллельности, взятому с обратным знаком. В результате этого плоскость прикладной рамки станет параллельной основной плоскости сооружения. 4.20. Количество и расположение опорных точек при обработке снимков на универсальных приборах устанавливается в зависимости от типа, содержания и заданной точности работ. При составлении фронтальных планов в масштабах 1:100, 1:200 на сооружении достаточно иметь две контрольные точки, расстояние между которыми измеряется в натуре. Базис съемки измеряется приближенно, поскольку масштабирование модели выполняется по опорным точкам. Таблица 8
При съемке сооружений в масштабах 1:50 - 1:10 и при съемке с наклонными оптическими осями необходимо на сооружении иметь четыре опорные точки. При съемке сложных сооружений может возникнуть необходимость в дополнительных точках. Во всех случаях целесообразно опорные точки располагать по геометрической схеме, т.е. строго по горизонтали или вертикали относительно одна другой. Это в значительной мере ускоряет и уточняет ориентирование снимков на универсальных приборах. Фотосъемочные работы при аналитической обработке снимков4.21. Аналитический метод как наиболее точный целесообразно применять для определения размеров основных деталей сооружения, когда для обмеров остальных, второстепенных, деталей используется фотоплан или чертежный план. При съемке сооружения целесообразно применять нормальный случай съемки при оптимальных параметрах. Отстояние устанавливается исходя из заданной точности съемки и захвата сооружения по высоте по формулам:
где B - базис съемки; mY - заданная средняя квадратическая погрешность определения отстояния; mp - средняя квадратическая погрешность определения продольного параллакса; pопт - оптимальное значение продольного параллакса, равное максимальному значению абсциссы на снимке (при формате снимка 13×18 см x = 75 - 80 мм); Z - максимальная высота сооружения над центром проекции; z - максимальное значение аппликаты на снимке (при формате снимка 13×18 см z = 60 - 100 мм). 4.22. Если в задачу работ входит определение только координат X и Z, то расчет отстояния выполняется по формуле
Значения mX, mZ, mp в зависимости от типа и качества приборов, условий съемки, точности, работы исполнителей могут колебаться в широких пределах. В среднем в качестве расчетных значений для фототеодолитов типа «Фотео 19/1318» и стереокомпаратора 1818 или стекометра можно принимать для маркированных точек mxz = 0,01 мм для контурных точек сооружения mx = mz = 0,02 мм, mp = 0,01 мм. При необходимости повышения точности определения координат увеличивают количество снимков на каждой станции, если нельзя по тем или иным причинам уменьшить отстояние. Порядок выполнения фотосъемочных работ4.23. Одним из наиболее ответственных этапов съемочных работ является фотографирование, так как от качества негативов в значительной степени зависит точность измерительных работ. Для съемок при естественном освещении используются контрастные или особоконтрастные фотопластинки чувствительностью 1 - 8 ед. ГОСТ 10691.1-73, из которых следует выбирать те, которые обеспечивают выдержку порядка 3 - 10 с. При определении выдержки и проявлении снимков следует обращать внимание на проработку всех деталей, учитывая, что при съемке сооружений различные детали освещаются по-разному. 4.24. Работа на станции по фотосъемке выполняется в такой последовательности. На левом конце базиса устанавливают на штативе фототеодолит, на правом - визирную марку. Центрирование производят обычным для геодезических инструментов способом. Фотокамеру нивелируют по уровням, и ориентирующее устройство устанавливается на отсчет, соответствующий заданному горизонтальному углу, между линией базиса и оптической осью (при нормальном случае съемки - 90°). Предварительно этот отсчет устанавливается по нарушенному лимбу, затем установка уточняется через микроскоп по лимбу ориентирующего устройства. Вращая весь корпус фотокамеры, наводят биссектор зрительной трубы ориентирующего устройства на марку, установленную на другом конце базиса. При закрытом объективе отводят прижимное устройство от прикладной рамки камеры и вставляют кассету с фотопластинкой. Вынимают шторку, поворотом барабанчиков подают рамку с кассетой, в результате чего под действием пружины фотопластинка прижимается к прикладной рамке камеры. На соответствующих барабанчиках фотокамеры устанавливают вид съемки (нормальный, отклоненный влево или вправо), а на нумераторе - номер снимка. После этого уточняют нивелирование фотокамеры по уровням, ориентирование фотокамеры - по ориентирному устройству и выполняют экспонирование. Затем устанавливают кассетную рамку в положение «Отжим», закрывают шторку и вынимают кассету. На место фотокамеры устанавливают визирную марку, а фотокамеру переносят на правый конец базиса, с которого в такой же последовательности выполняют фотосъемку. В процессе фотосъемки ведется журнал, в который заносятся названия объектов, номер станции, номера снимков, направление оптической оси, отсчет угла скоса, номера кассет, экспозиция, положение объектива и время фотографирования. 5. КАМЕРАЛЬНЫЕ ФОТОГРАММЕТРИЧЕСКИЕ РАБОТЫСоставление фронтальных планов методом фототрансформирования5.1. Выполнение архитектурно-строительных обмеров путем составления фотопланов обладает рядом преимуществ: увеличивается производительность работ, повышается наглядность и информационная емкость по сравнению с чертежным планом, уменьшается количество снимков, используется более простое оборудование. Составление фронтальных планов указанным методом состоит из подготовительных работ, трансформирования и монтажа снимков, изготовления репродукций. Если необходимо изготовить чертежный план, то выполняются камеральное дешифрирование, отбеливание фотоизображения и размножение чертежей. Подготовительные работы5.2. Подготовительные работы при обработке снимков сооружений способом фототрансформирования включают следующие процессы: поверки и юстировки фототрансформаторов; подготовку основы и снимков; выбор сорта и определение деформации фотобумаги. Поверки и юстировки фототрансформаторов5.3. При трансформировании фототеодолитных снимков архитектурных сооружений необходимо выполнить дополнительные поверки фототрансформаторов: при горизонтальном экране установить параллельность экрана и кассеты фототрансформатора с погрешностью не более 0,5αдоп; при трансформировании снимков по двум-трем опорным точкам на ФТБ необходимо вынести на экран линию оси его вращения и проекцию главной вертикали. Положение этих линий на экране ФТБ наиболее просто находится с помощью контрольной решетки и контрольной сетки, вычерченной на бумаге. С этой целью на контрольной решетке отмечаются кружками центральная точка и углы квадрата. Решетка устанавливается в кассету и проектируется при наибольшем увеличении на горизонтальный экран. На экран кладется лист бумаги размером 60×80 с нанесенной на координатографе сеткой квадратов со стороной 10 - 20 см. Осевые линии контрольной сетки утолщаются. Одна из осевых линий контрольной сетки устанавливается примерно по оси вращения экрана, другая - по линии направления съемки. Движением χ кассета поворачивается таким образом, чтобы проектирующиеся на экран осевые линии контрольной решетки совпали с осевыми линиями контрольной сетки. Изменением масштаба изображения добиваются совпадения крайних вертикальных (перпендикулярных оси экрана) линий. Экран наклоняется на максимальный угол, в результате чего изображения контрольной решетки преобразуются в трапеции. Затем вращением χ кассеты и контрольной сетки на экране добиваются полного совпадения проектирующихся осевой горизонтальной линии с осевой линией контрольной сетки и крайней горизонтальной линии контрольной решетки с горизонтальной линией контрольной сетки, причем для совмещения линий следует несколько изменить наклон экрана. После этого введением поперечной децентрации добиваются совмещения проектирующейся вертикальной осевой линии (главной вертикали) контрольной решетки с вертикальной осевой линией (линией направления съемки) контрольной сетки на экране. После полного совпадения параллельных горизонтальных линий и вертикальных осевых линий введением продольной децентрации добиваются такого масштаба изображения, чтобы длина отрезка горизонтальной осевой линии, которая располагается вдоль оси экрана, стала равной длине этого же отрезка, которую он имел при горизонтальном экране. Затем карандашом прочерчивается линия направления съемки и отмечаются концы горизонтальной осевой линии. Экран устанавливается вновь в горизонтальное положение. При этом если юстировка выполнена, то совмещение проектирующих осевых линий контрольной решетки и контрольной сети не нарушится. В противном случае юстировка повторяется. Юстировка считается выполненной при определении положения линии направления съемки с точностью 0,2 - 0,3 мм, а положения оси вращения экрана - с точностью 0,5 - 1 мм. После окончания поверки осевые линии прочерчиваются на экране фототрансформатора черной тушью. Подготовка основы и снимков5.4. Порядок подготовки основы зависит от способа монтажа трансформированных снимков (монтаж отдельных снимков или оптический монтаж), от способа трансформирования снимков (по опорным точкам либо по установочным данным) и от расположения опорных точек (точки находятся на одной горизонтальной линии, на одной плоскости, в разных плоскостях). В качестве основы используется белый ватман, наклеенный на жесткий пластик или алюминий. Если съемка архитектурного сооружения выполнялась с нескольких фотостанций и монтаж фотоплана производится по отдельным снимкам, то опорные точки наносятся непосредственно на планшет. Опорные точки наносятся с использованием координатографа, в противном случае на планшете вычерчивается сетка квадратов с помощью линейки Дробышева и опорные точки наносятся по координатам с помощью циркуля и масштабной линейки. В любом случае предельная ошибка нанесения точек не должна превышать 0,2 мм. 5.5. При оптическом монтаже снимков на жесткую основу наклеивается фотобумага. После сушки основы на нее накладывается черная бумага, края которой подгибаются и приклеиваются с обратной стороны планшета. Поверх черной бумаги приклеивается тонкая белая бумага, на которую наносятся опорные точки. 5.6. Если опорная точка расположена в другой вертикальной плоскости, для которой выполняется трансформирование, то в положение такой точки вносится поправка, рассчитываемая по формуле
где r - расстояние от точки надира до опорной точки на планшете; ∆Y - отступление опорной точки по глубине от общей плоскости, для которой выполняется трансформирование; Y - отстояние от фотостанции до плоскости сооружения (измеряется по перпендикуляру плоскости сооружения). Расстояние r должно быть измерено с точностью, определяемой по формуле
Так, при Y/∆Y = 10, m∆r = 0,2 мм получим mr = 2 мм. Для измерения расстояния r с такой точностью положение точки надира на планшете должно определяться (при указанном соотношении Y/∆Y) с погрешностью, не превышающей 2 мм. При меньшей глубине деталей сооружения требования к точности определения координат точки надира снижаются. При малых углах непараллельности между плоскостью прикладной рамки фотокамеры и основной плоскостью сооружения расстояния можно измерять от пересечения линий, соединяющих положение координатных меток при данном положении объектива. 5.7. Расстояние r можно измерять от главной точки при углах наклона, не превышающих величины, вычисляемой по формуле
При Y/∆Y = 10, f
= 200 мм, m∆r =
0,2 мм получим При меньшей глубине сооружения значение угла непараллельности может быть большим. Если значение угла непараллельности превышает установленный допуск, то на снимке должно быть определено положение точки надира. Достаточно просто положение точки надира определяется на планшете по результатам выполнения полевых работ. 5.8. Подготовка снимков заключается в их подборе и наклоне на столе фототрансформатора при проектировании снимка. Наколка опорных точек выполняется иглой при рассматривании негатива под увеличением 4 - 8х. При этом на фотопластинке вращением иглы прокалывается эмульсия или иглой прочерчивается крестообразный знак со сторонами 0,5 - 0,1 мм, причем центр накола или креста должен совпадать с опорной точкой. Наиболее точно наколка точек на фотопластинке может быть осуществлена с помощью специальных маркирующих приборов (ДСИ ЦНИИГАиК, «Трансмарк» и др.). Выбор сорта и определение деформации фотобумаги5.9. Подбор фотобумаги выполняется по контрастности в зависимости от качества полученного негативного фотоматериала. Подбор фотобумаги, выдержки и режима фотообработки обычно выполняют опытным путем, добиваясь получения качественного позитивного изображения объекта. В результате получают эталонный фотоотпечаток, с фототоном которого в последующем сравниваются все изготовляемые при трансформировании отпечатки. 5.10. Если при трансформировании используется фотобумага на деформирующейся подложке, то перед ее использованием необходимо определить коэффициент деформации бумаги. Для определения коэффициента деформации фотобумаги на нее контактным способом печатается контрольная решетка, причем на трансформированном отпечатке. Таких отпечатков изготовляются два-три. После фотообработки и сушки измеряются на отпечатках расстояния между удаленными штрихами решетки с точностью 0,1 - 0,2 мм. Расстояния измеряются вдоль и поперек направления волокон подложки в двух-трех местах. Коэффициент деформации вычисляется по формулам:
где lx0, lz0 - расстояния между штрихами на контрольной решетке; lx, lz - расстояния вдоль и поперек направления волокон бумаги. Методы фототрансформирования5.11. Фототрансформирование снимков для создания фронтальных планов сооружений может выполняться различными методами, зависящими от способа выполнения полевых работ, от вида сооружения и т.д. Снимки для монтажа фотопланов могут быть получены путем трансформирования: на одну горизонтальную плоскость; на одну наклонную плоскость; на несколько горизонтальных или наклонных плоскостей (зон); дифференцированным трансформированием. Трансформирование фотоснимков может выполняться по опорным точкам и по установочным элементам. Трансформирование на горизонтальную плоскость применяется в тех случаях, когда углы непараллельности между плоскостью прикладной рамки фотокамеры и основной плоскостью сооружения не превышают значений, приведенных в табл. 4, и при коэффициенте трансформирования K ≤ 3. Трансформирование фотоснимков на наклонную плоскость можно применять, если сооружение на фотоснимке имеет несколько плоскостей, расположенных под углом. Трансформирование фотоснимков на несколько плоскостей (зон) выполняется для сложных сооружений, имеющих значительное количество деталей, отступающих от общей плоскости сооружения. Если же количество элементов сооружения вызывают необходимость трансформирования более чем на три плоскости или в случае насыщенности сооружения рельефными, скульптурными деталями, следует применять дифференциальное фототрансформирование. Трансформирование снимков по установочным данным может применяться как первая стадия трансформирования по опорным точкам при больших значениях углов непараллельности многостадийным методом. Трансформирование снимков сооружений по опорным точкам может выполняться по двум опорным точкам (или одному отрезку); трем лежащим на одной горизонтальной линии; четырем, расположенным по углам сооружения. Дифференциальное фототрансформирование5.12. Наиболее совершенным способом получения одномасштабного фотографического изображения рельефной местности (или фотоснимка здания, имеющего значительное количество деталей, отступающих от основной плоскости) является способ дифференциального трансформирования, который заключается в последовательном сканировании модели по параллельным маршрутам с одновременным проектированием снимка через щель на светочувствительный материал. На трансформированном снимке (ортофотоснимке) изображение складывается из растровых полос, длина которых ограничивается размерами рабочей площади снимка, длиной щели. При перемещении щели по маршруту (полосе) производят профилирование: высоту проектирования изменяют в соответствии с профилем местности по маршруту, чем устраняют ошибки снимка, вызванные рельефом. В основу дифференциального трансформирования положен принцип сохранения для каждой точки местности длин проектирующих лучей (в масштабе обработки), существовавших в момент съемки. Так как проектировать снимки отдельными точками практически невозможно, то их проектируют элементарными площадками. Но в пределах таких площадок точки имеют разные высоты, что приводит к ошибкам ортофотоснимков. Наибольшие ошибки имеют точки, изобразившиеся на границах элементарных площадок. 5.13. При дифференциальном фототрансформировании горизонтальных снимков в случае профилирования в направлении оси Y максимальные ошибки ортофотоснимков, обусловленные рельефом в пределах элементарных участков, будут определяться зависимостями:
где ∆Xvx, ∆Yvx - максимальные ошибки координат точек, изобразившихся на границах полос трансформированного изображения в масштабе исходного снимка; L - длина щели; x, y - координаты определяемой точки на исходном снимке; vx - угол наклона местности, измеряемый в плоскости, параллельной плоскости xz; f - фокусное расстояние АФА. 5.14. При обработке наклонных снимков совместное влияние рельефа и участков наклона на точность ортофотоснимка выражается зависимостями:
где αx - угол наклона снимка в плоскости xz. 5.15. Фотокачество ортофотоснимков зависит от нескольких факторов, из которых особое значение имеют два: текущее изменение масштаба фотопроектирования и форма щели. Влияние первого фактора проявляется в увеличении смаза (нерезкости) изображения, второго - в полосатости изображения. Причиной смаза изображения является изменение масштабного коэффициента фотопроектирования в пределах элементарного участка. Масштабный коэффициент n меняется вследствие того, что в пределах элементарного участка наблюдается изменение высот точек по направлению движения щели. Коэффициент n подсчитывается по формуле
где n - масштабный коэффициент фотопроектирования; xФ - высота фотопроектирования; FФ - фокусное расстояние фотопроектирующей системы; ∆Fα - поправка в фокусное расстояние прибора за влияние углов наклона. При обработке горизонтальных снимков величина сдвига точки ортофотоснимка подсчитывается по формуле
где ∆SvY - сдвиг точки; l - ширина щели; vY - угол наклона местности, измеряемый в плоскости, параллельной плоскости YZ; r - расстояние от точки надира до определяемой точки. 5.16. Если обрабатываются плановые аэроснимки и углы наклона снимка учитываются масштабным коэффициентом, то величина сдвига, вызванного совместным влиянием рельефа и угла наклона снимка, подсчитывается по формуле
если углы наклона не учитываются масштабным коэффициентом, то по формуле
5.17. Полосатость изображения на ортофотоснимке получается в виде четко выраженных стыков соседних полос вследствие ошибок прибора, дифракции от края щели и т.п. Для уменьшения полосатости целесообразнее использовать щель, имеющую форму параллелограмма с углом 45 - 55° При профилировании в направлении оси Y ошибки в абсциссах ∆X могут привести к исчезновению контуров на стыках полос ортофотоснимков. На величину этих ошибок оказывает влияние ряд факторов, в том числе длина щели. В табл. 9 приведены допустимые длины щели в зависимости от крутизны скатов и широкоугольности съемочных камер. При расчете допуск на исчезновение контуров принимался равным 0,7 мм. Таблица 9
Дифференциальное фототрансформирование на щелевом фототрансформаторе ФТЩ5.16. Прибор состоит из трех обычных проекторов и щелевого проектора. Для измерения модели служит измерительный столик, на котором находятся два экрана с измерительными марками, стереоскоп и счетчик высот. На два экрана столика проектируются снимки, которые рассматриваются через стереоскоп. При перемещении измерительной марки по высоте одновременно изменяется коэффициент увеличения на фотоувеличителе. Перемещение же измерительного столика в горизонтальной плоскости вызывает соответствующее перемещение каретки щелевого проектора, оптическая система которого проектирует изображение через узкую щелевую диафрагму на светочувствительный материал. Проектирование изображения фотоснимка выполняется по частям, ширина полосы сканирования равна выбранной длине щели. Перемещение столика по взаимно параллельным направлениям, отстоящим одно от другого на длину щели, осуществляется автоматически. Таким образом, путем последовательного сканирования модели по параллельным маршрутам с одновременным проектированием изображения снимка через щель получают точную ортогональную проекцию фотоснимка - ортофотоснимок. Так как коэффициент увеличения в пределах щели сохраняется постоянным, длина щели изменяется в зависимости от характера сооружения. Для более рельефных снимков длина щели должна быть уменьшена, что приведет к увеличению числа полос сканирования, а при плоском сооружении длина щели может быть увеличена. 5.19. Основными процессами создания ортофотоснимка на щелевом фототрансформаторе являются: подготовительные работы; построение модели; установка камеры щелевого проектора; щелевое проектирование. В подготовительные работы входят: изготовление диапозитивов, выбор направления движения щели, выбор длины щелевой диафрагмы, изготовление основ для трансформирования, установка фокусных расстояний камер и высот проектирования. Диапозитивы изготовляют на фотоуменьшителе. Направление движения щели вдоль оси X или Y прибора выбирают в зависимости от снимаемого сооружения и характера съемки. При съемке конусообразного сооружения или при наклонной оптической оси сканирование выполняется вдоль оси X. Если же выполнялась съемка с базиса, непараллельного плоскости сооружения, направление полосы сканирования выполняется по оси Y. Длина щели подсчитывается по формуле
где δrx - ошибка в положении точек на краю полосы; f - фокусное расстояние снимков; r - расстояние на снимке от точки надира до определяемой; α - угол наклона (непараллельности) сооружения. Построение модели выполняется по трем диапозитивам. Снимки ориентируют взаимно и внешне по опорным точкам. Высота проектирования определяется по формуле
где K - коэффициент преобразования связки:
f - фокусное расстояние снимка; n - коэффициент увеличения диапозитива; nf - фокусное расстояние диапозитива; H - отстояние от плоскости сооружения. Фокусное расстояние камеры тройного проектора:
где F - фокусное расстояние объектива камеры. Фокусное расстояние камеры щелевого проектора:
Если эту величину установить нельзя, то трансформирование выполняется с преобразованной связкой. Установку камеры щелевого проектора выполняют в соответствии с элементами ориентирования второй камеры тройного проектора. 5.20. В настоящее время широкое распространение получило дифференциальное трансформирование с помощью стереоприборов, снабженных фотопреобразователями. Таковы фотостереограф Ф.В. Дробышева, ортофотопроектор ОФПД, стереотригомат, топокарт фирмы «Цейсс» (ГДР). В этих приборах осветитель и щель неподвижны, а для проектирования используется один из неподвижных снимков стереопары. Соответственно ориентировке изображения одновременно перемещаются в противоположных направлениях фотокассеты с фотоматериалами. Изменение масштаба проектирования достигается перемещением экрана и щели вверх, вниз или посредством призм, удлиняющих или укорачивающих расстояния в горизонтальном направлении. Ортофототрансформирование с помощью ортофотопроектора ОФПД5.21. Ортофотопроектор ОФПД конструкции Ф.В. Дробышева предназначен для создания карт на основе фотоплана при значительных колебаниях рельефа местности. ОФПД создан на базе стереографа СД-3, на столе которого установлена фотоприставка, позволяющая выполнять проектирование правого снимка стереопары на светочувствительный материал. Снимки, составляющие стереопару, взаимно ориентируются на устранение поперечных параллаксов, в результате чего устанавливаются элементы ориентирования. Затем включаются моторы, ручной высотный штурвал и конденсорный осветитель снимка и выполняется проектирование правого фотоснимка стереопары на светочувствительный материал. Через щель на фотоматериал попадает изображение только небольшого участка фотоснимка, с которым совпадает измерительная марка наблюдательной системы, взаимное ориентирование снимков при этом не нарушается, так как правый и левый снимки перемещаются одновременно при движении каретки X в направлении осей X и Y прибора. При пробном профилировании проверяются точность стыкования полос, резкость изображения, что фиксируется отсчетами по микрометру. Полученный с диапозитивного снимка ортонегатив после фотообработки переносят на фототрансформатор, где он приводится к заданному масштабу. 5.22. На ортофотоплане свободными от искажения будут только те точки, с которыми во время проектирования фотоснимка совпадала измерительная марка. Проектирование же ведется полосой, ширина которой определяется размером щели (длина щели 1, 2, 3 или 4 мм). Поэтому боковые точки полосы будут иметь на ортофотоплане остаточные искажения за рельеф. Кроме того, коррекционный механизм прибора вводит поправку за угол наклона в координаты наблюдаемой точки, следовательно, точки, с которыми не совпадала марка, будут иметь искажения и за угол наклона снимка. В результате этого на стыке полос некоторые точки могут изобразиться дважды, но некоторые не изобразятся вовсе. Величины остаточных искажений будут тем больше, чем значительнее отступление некоторых деталей сооружения от основной плоскости и угол наклона снимка и чем больше размер щели. При наличии плоского сооружения или наклона вдоль оси Y стыкование полос будет происходить с наибольшей точностью, что определяется положением узкой стороны щели параллельно оси X прибора. При угле наклона плоскости сооружения вдоль оси X прибора будут проявляться ошибки в стыковании полос в функции этого угла. Поэтому необходимо вводить поправки в масштаб проектирования снимков. Зная ширину щели m, угол наклона (непараллельности) α, высоту проектирования H и координату X модели, можно определить значение условного перекрытия ∆ и величину поправки h1 по формулам:
Пример. m = 4 мм, α = 15°, H = 140 мм, ∆ = 0,2 мм, h1 = 11,5/2. Учитывая возможность допуска ошибок порядка 0,1 мм, введение масштабного фактора можно делить по значению h с точностью до 2 мм. Ведущая гайка в фотоприставке расположена на повторительном суппорте и может перемещаться карданным валиком, кремальерной шестерней с отсчетом значений h’ по круговой шкале, расположенной на ящике фотоприставки. Следует отметить, что при повышении плоскости здания масштаб изображения следует уменьшать, а при понижении - увеличивать. Дифференциальное трансформирование снимков с помощью фототрансформатора «Ортофот»5.23. Ортофот, входящий в комплекс приборов «Топокарт-Ортофот-Орограф», является дифференциальным фототрансформатором, предназначенным для создания ортопланов в заданном масштабе. Комплекс приборов «Топокарт-Ортофот-Орограф» при однократном ориентировании модели на топокарте позволяет вести измерения координат, точек модели, дифференциальное трансформирование снимков на ортофоте с одновременным штриховым изображением рельефа с помощью ортографа. Благодаря большому диапазону возможных коэффициентов увеличения исходных аэроснимков в процессе их дифференциального фототрансформирования (от 0,7 до 5) ортофотопланы и орографические изображения рельефа могут быть получены в заданных масштабах без дополнительного фотографического увеличения или уменьшения. Для получения ортофотоснимков используется фотопленка или фотобумага, но более подходящей является фотопленка ФТ-11П, так как она отличается достаточно высокой чувствительностью и малым коэффициентом деформации. Преимущество использования фотобумаги состоит в исключении процесса контактной печати, хотя в этом случае обязателен учет ее деформации. 5.24. После ориентирования снимков на «Топокарте» приступают к фототрансформированию. Предварительно подбирают длину щели L, пользуясь табл. 10. 5.25. Скорость сканирования выбирается в зависимости от крутизны ската местности, плотности негативов, а также чувствительности фотоматериала. Особенностью данного комплекса приборов является возможность независимого перемещения правой каретки со снимком и кассеты с экспонируемым фотоматериалом. Но при этом возникает необходимость в согласовании величин их взаимного перемещения. Механическая связь (рис. 7) каретки со снимком «Топокарта» и кассеты «Ортофота» должна удовлетворять условию Таблица 10
Рис. 7. Схема перемещения правого снимка топокарта и кассеты ортофота
где l - величина перемещения каретки правого снимка или изображения точки этого снимка; l' - величина перемещения светочувствительного материала в кассете «Ортофота» или проекции изображения точки снимка на светочувствительный материал; mk - знаменатель масштаба карты; mc - знаменатель масштаба аэрофотоснимка. Несогласование величин l и l' приводит к разрыву контуров на ортофотоснимке. При этом на стыках полос при l > l'mk/mc часть контуров исчезает, а при l < l'mk/mc некоторые участки изображаются дважды. Механическое «согласование» проверяется путем сравнения расстояний, на которые переместились кассета «Ортофота» и игла координатографа по оси Y. Оптического «согласования» окончательно добиваются путем поворота элемента обслуживания Ck прибора «Ортофот» на величину, устанавливаемую опытным путем. Контролем соблюдения условия, определяемого формулой (79), является отсутствие разрывов и двоения контуров на ортофотоснимке, полученном в результате пробного сканирования. Фотограмметрические методы сгущения опорной геодезической сети5.26. Фотограмметрические методы сгущения опорной геодезической сети применяют при съемках больших сооружений, когда съемка выполняется с нескольких базисов и когда точность определения координат опорных точек фотограмметрическими методами сгущения не ниже требований к точности опорных точек, приведенных в табл. 1. Фотосъемку выполняют с 55 - 60 %-ным продольным перекрытием. 5.27. Геодезические опорные точки при коротких секциях располагают попарно на концах секций (табл. 11), при длинных секциях - попарно на концах и в середине секции (табл. 12).Общее число определяемых точек в пределах стереопары при аналитической фототриангуляции ограничивается возможностями используемой программы. Если требуемое число определяемых точек больше предусмотренного программой, то можно применять вставку точек, например, по программе для аналитической обработки отдельных стереопар (прил. 3), или многократный счет на ЭВМ с включением различных определяемых точек. Количество определяемых точек зависит от методики последующей обработки снимков. При составлении фронтальных планов методом фототрансформирования основные плоскости сооружения в пределах снимка должны иметь достаточное для их трансформирования количество опорных точек (см. разд. 4). При аналоговой обработке снимков в пределах стереопары необходимо определять не менее четырех планово-высотных опорных точек, расположенных по углам стереопары или углам сооружения. При аналитической обработке снимков количество определяемых точек зависит от сложности сооружения и устанавливается при составлении проекта фототриангуляции. Определяемые точки следует намечать на четких контурах, позволяющих их надежное отождествление. Точки намечают при стереоскопическом рассматривании снимков с увеличением, соответствующим соотношению масштабов снимок-план. Определяемые точки намечают на контактных отпечатках, а затем маркируют на негативах. 5.28. Снимки при аналитической фототриангуляции измеряют на стереокомпараторах или монокомпараторах, удовлетворяющих требованиям прил. 1. Порядок измерений снимков и записи результатов измерений определяется руководством к используемой программе. Снимки целесообразно измерять двум исполнителям. Для повышения точности и надежности фототриангулирования при использовании обычных фотопластинок, не отбракованных на неплоскостность, целесообразно выполнять двух- или трехкратную съемку, что позволяет исключить из окончательных результатов ошибки, вызванные неплоскостностью фотопластинок. Построение сети фототриангуляции аналитическим методом должно контролироваться путем анализа погрешностей измеренных координат. Величины стандартных погрешностей, вычисляемых ЭВМ, не должны превышать при измерениях координат 0,02 мм, а остаточные поперечные параллаксы после взаимного ориентирования 0,01 мм. Предельные значения погрешностей, которыми руководствуются при исключении грубых ошибок, не должны соответственно превышать 0,045 и 0,022 мм. Таблица 11
5.29. Фототриангулирование аналоговым способом можно применять в случае, когда дальнейшая обработка снимков выполняется способом фототрансформирования и на универсальных стереофотограмметрических приборах. Таблица 12
Взаимное ориентирование снимков на универсальных приборах выполняется в линейно-угловой системе движениями xП, by, bz, αП, ωП. При аналоговой фототриангуляции должны соблюдаться следующие средние значения допусков: центрирование снимков и установка отсчетов на шкалах децентраций СД и СПР выполняется с точностью 0,1 мм; остаточные поперечные параллаксы после взаимного ориентирования не должны быть более 0,015 мм; расхождения между значениями плановых координат из двух отсчетов не должны превышать 0,07 мм в масштабе модели, а отстояний - 0,2 мм; остаточные расхождения высот и плановых координат на связующих точках при передаче масштаба не должны соответственно превышать 0,2 и 0,1 мм в масштабе модели. Качество построения сети оценивают по значениям величин деформации кручения и прогиба. Средние значения этих деформаций сети не должны превышать удвоенных значений допусков к точности определения опорных точек для соответствующего класса точности выполняемых архитектурных обмеров (см. табл. 1). При внешнем ориентировании аналоговой сети фототриангуляции аналитическим способом поправки к координатам должны выполняться по уравнениям второй или третьей степени. При графическом или оптико-механическом редуцировании расхождение проекции опорных точек с их положением на основе не должно превышать 0,2 мм. Контроль редуцирования выполняют повторным редуцированием, при этом плановое смещение определяемых точек не должно превышать 0,4 мм. За окончательное положение берут среднее из двух полученных положений. По результатам триангулирования составляют каталоги координат, элементов ориентирования, базисов фотографирования. Точность фотограмметрических координат оценивают по их расхождениям с геодезическими координатами на контрольных точках. Трансформирование снимков на наклонную плоскость5.30. При трансформировании снимков на наклонную плоскость необходимо учитывать угол, составленный наклонной плоскостью к горизонту. Так как фототрансформирование является перспективным преобразованием и в фототрансформаторе проектируют точки негатива на ортогональную проекцию соответствующих точек сооружения на горизонтальную плоскость плана, возникают различия в размерах и форме фигуры трансформирования на наклонной плоскости и на плане. Если это различие в масштабе плана практически допустимо, то им пренебрегают и трансформируют изображение наклонной плоскости (грани) как изображение горизонтальной плоскости. Угол наклона плоскости сооружения, который можно практически не учитывать при фототрансформировании, определяется по формуле
где l - длина трансформируемой линии в масштабе плана, мм. На основании формулы (80) составлена табл. 13. Таблица 13
Из табл. 13 следует, что при фототрансформировании наклонных граней можно пренебрегать сравнительно большими углами наклона плоскости сооружения, особенно для граней небольшой протяженности. 5.31. Допустимые значения превышений опорных точек над плоскостью трансформирования определяются по формуле h = Lsini = lMsini, (81) где L - длина наклонной линии на сооружении. При трансформировании по граням (изображениям наклонных плоскостей) можно пренебрегать сравнительно большими превышениями. Если на снимке изображено здание, имеющее несколько наклонных плоскостей (граней), то в таком случае необходимо каждую грань обеспечить по краям ее четырьмя ориентирующими точками и трансформировать их отдельно, соблюдая геометрические условия трансформирования. Если искажения, вызванные наклоном плоскости трансформирования, значительны, то их можно устранить путем афинного трансформирования. Трансформирование по ступеням5.32. Трансформирование снимков сооружений, имеющих значительное количество деталей, отступающих от основной плоскости, выполняется по ступеням (зонам). Фототрансформирование по ступеням производится по опорным точкам, которыми должна быть обеспечена каждая плоскость сооружения. Трансформирование начинают с той плоскости, которая имеет большую площадь и большое количество опорных точек. Трансформирование следующей плоскости (зоны) выполняется по опорным точкам этой плоскости, масштаб изображения контролируется по отрезкам, общим для двух плоскостей (длина ребра здания, расстояние между окнами первого и верхних этажей). При трансформировании снимка сооружения по ступеням получают столько отпечатков, сколько плоскостей было выделено на сооружении. Трансформирование снимков по ступеням можно выполнять и другим способом, при котором достаточно иметь опорные точки на сооружении только для одной, обычно средней плоскости, которую принимают за начальную. В этом случае для трансформирования последующих ступеней рассчитывают величину изменения проекции какого-либо отрезка негатива, например заключенного между координатными метками, и в соответствии с этим переходом к следующей зоне изменяют масштаб изображения на экране. 5.33. Изменение величины отрезка можно определить по формуле
где l - отрезок при трансформировании начальной зоны; ∆Y - глубина плоскости трансформирования относительно начальной; Y - отстояние. Этот способ трансформирования теоретически не является строгим, так как при изменении масштаба изображения под действием перспективного инверсора изменяется наклон плоскости негатива, вследствие чего возникает искажение изображения. Однако при небольшом числе зон эти искажения практически неощутимы, что и позволяет применять этот способ трансформирования на практике. 5.34. При значительном количестве зон трансформирование снимков целесообразно выполнять методом оптического монтажа. Изготовление фотоплана путем оптического монтажа зон производится при больших коэффициентах увеличения (R ≥ 3), наиболее применим для этих целей фототрансформатор SEG-V. Особенности трансформирования снимков по зонам при оптическом монтаже заключаются в следующем. При трансформировании снимков по зонам точность установки угла наклона плоскости негатива должна обеспечиваться в пределах величины δφp, вычисляемой по формуле:
где δR - допустимое искажение на экране. Изменение величины δφp угла наклона плоскости негатива при последовательном трансформировании снимка по зонам незначительно по сравнению с требуемой точностью установки величины φp, что позволяет составлять фотоплан без дополнительного контроля изменения величины φp в процессе оптического монтажа. Изменение масштаба изображения при переходе к следующей зоне трансформирования необходимо учитывать по шкале коэффициента увеличения в соответствии с формулой
где h - высота зоны трансформирования; MП - знаменатель масштаба плана. Величина децентрации негатива, установленная для исходной зоны, не должна изменяться в процессе оптического монтажа зон даже при большом количестве зон трансформирования. 5.35. При оптическом монтаже, расположив на экране трансформатора основу с нанесенными опорными точками, добиваются совмещения точек, проектирующихся с негатива с точками на «рубашке» основы. Затем в «рубашке» вырезают отверстие по границам начальной зоны и производят экспонирование, чтобы изображение отпечаталось на фотобумаге, после чего отверстие заклеивают. Для перехода к следующей зоне изменяют масштаб изображения и вырезают в «рубашке» отверстие для этой зоны. Таким образом проектируют на основу все зоны. После фотообработки получают фотоплан в виде единого фотоизображения. Если таким способом монтируется фотоплан без трансформирования по зонам, то в «рубашке» вырезают не зону, а рабочую площадь данного снимка. Трансформирование снимков по установочным элементам5.36. Трансформирование снимков по установочным элементам выполняется на фототрансформаторах ФТБ, SEG-V, «Ректимат», которые имеют соответствующие шкалы для установки расчетных данных. Установочные данные вычисляют по элементам внешнего и внутреннего ориентирования, при этом учитывают систему элементов ориентирования, принятую в приборе, вместо углов наклона экрана и объектива и вместо децентрации снимка используются их составляющие по двум взаимно перпендикулярным осям. Элементы трансформирования, устанавливаемые оператором, представлены в табл. 14. Кроме этих величин определяют расстояния на основе между координатными метками (XX или ZZ) и негативы в кассетах фототрансформатора центрируют и ориентируют по соответствующим координатным меткам. 5.37. Вычисленные элементы трансформирования устанавливаются на соответствующих шкалах трансформаторов с учетом места нулей шкал. В результате такой установки и освещения негатива на экране получается трансформированное изображение, которое фиксируется фотографически. После выполнения указанной установки может потребоваться небольшое подориентирование фотоснимка, с тем чтобы наилучшим образом совместить изображение трансформационных точек с соответствующими им опорными точками на планшете. Трансформирование снимков по установочным данным требует тщательной юстировки прибора и определения значений мест нулей шкал. У фототрансформатора ФТБ наклон экрана устанавливается с точностью 10’, поэтому этот прибор можно использовать для трансформирования снимков по установочным данным при коэффициентах трансформирования 1,5 - 2. При больших коэффициентах трансформирования установочные данные могут использоваться для ускорения трансформирования снимка по опорным точкам. Таблица 14
Если используется для трансформирования по установочным элементам фототрансформатор «Ректимат», то трансформирование выполняется с коэффициентом не более 2 - 2,5. Учитывая сравнительную сложность способа трансформирования снимков по установочным элементам, его следует использовать как первую стадию трансформирования по опорным точкам при больших значениях углов непараллельности многостадийным методом и когда установочные данные определяются на ЭВМ как дополнительные данные при аналитической обработке снимков. Многостадийное трансформирование5.38. Многостадийное трансформирование выполняется для перспективных снимков. Процесс многостадийного трансформирования можно рассматривать как трансформирование ряда одинаковых стадий, так как установки фототрансформатора, определенные один раз, остаются неизменными для каждого последующего этапа. Предельный угол наклона снимка Eдоп для трансформирования в одну стадию определяется по формуле
где φмакс - предельный угол наклона фототрансформатора; F - фокусное расстояние фототрансформатора. Количество стадий трансформирования подсчитывается по формуле
где E - фактический угол наклона снимка. Полученный коэффициент трансформирования равен:
где MПЛ - масштаб составляемого фронтального плана. Коэффициент трансформирования одной стадии трансформирования равен:
где n - количество стадий трансформирования. 5.39. Элементы трансформирования, устанавливаемые оператором при трансформировании в несколько стадий, и формулы, по которым вычисляются установочные элементы для трансформаторов ФТБ, SFG-V, «Ректимат», приведены в табл. 15. Кроме элементов трансформирования, устанавливаемых оператором, определяются элементы трансформирования, устанавливаемые автоматически, которые представлены в табл. 15. 5.40. Трансформирование снимков первой стадии производится аналогично п. 5.37. Полученное при трансформировании изображение экспонируется на фотопленку. После фотохимической обработки позитив укладывается в кассету фототрансформатора, и при тех же установках, что и для первой стадии, производится экспонирование на фотопленку. Обычно количество стадий редко превышает две. Если трансформирование заканчивается на изготовлении негативов, то с него контактным способом изготовляют отпечаток на фотобумаге. Если трансформируется снимок рельефного сооружения, то переход от начальной зоны трансформирования к последующей осуществляется изменением масштаба трансформирования аналогично пп. 5.32 - 5.35. Таблица 15
Монтаж фронтальных фотопланов5.41. Монтаж фотоснимков зависит от способа трансформирования снимков (по опорным точкам, трансформированным на одну плоскость, по ступеням). Монтаж снимков при трансформировании на одну плоскость выполняется аналогично монтажу аэроснимков путем совмещения опорных точек на отпечатке с соответствующими точками на основе. Если трансформирование выполнялось по двум или трем опорным точкам, расположенным на одной линии, при монтаже проверяется равенство ребер сооружения, расположенных на краях фотоснимка. Если выполняется монтаж снимков, трансформированных по зонам, то порезка их производится по прямым линиям, соответствующим линиям контуров (углов здания, выступов), которые являются границами соответствующих плоскостей трансформирования. Монтаж начинают с той плоскости сооружения, которая обеспечена большим количеством опорных точек. Монтаж следующих отпечатков производится по опорным точкам данной плоскости и по общим отрезкам на сооружении, изображенном на двух отпечатках. Чтобы при монтаже таких снимков не произошло увеличение или уменьшение сооружения, необходимо на основе наносить по натурным измерениям опорные точки, соответствующие границам плоскостей и сооружений. Максимальное несовпадение контуров не должно превышать 0,5 мм. Получение графического плана на основе фронтального фотоплана, оформление плана5.42. Для получения графического плана на фотоплане вычерчиваются все детали сооружения, после чего фотоизображение отбеливается. При съемке плоских фасадов, где нет значительных отступлений деталей сооружения от основной плоскости, практически вычерчиваются все элементы здания. Вычерчивание рекомендуется начинать с простых, крупных деталей с последующим переходом к более сложным. При монтаже трансформированных снимков рельефных сооружений остаются детали, имеющие перспективные смещения за отступления от общей плоскости (балконы, карнизы и т.д.), которые не исключаются при трансформировании. Смещение таких деталей может быть исправлено при дешифрировании. Для исключения перспективных искажений вычерчивание таких деталей выполняется со смещением, компенсирующим перспективное искажение, которое определяется путем измерений на основе перспективного проектирования. Вычерчивание производят черной тушью, в которую добавляют двухромовокислый калий, для того чтобы при последующей обработке тушь не смывалась. Вычерченный фотоплан отбеливают в 10 %-ном растворе красной кровяной соли до полного исчезновения фотоизображения. Полученный после высушивания план подлежит корректировке: восстанавливаются размытые линии, устраняются пропущенные дефекты вычерчивания. Долее приступают к оформлению чертежа: вычерчивают рамки, установленный образец штампа и все необходимые дополнительные данные. Составление фронтальных планов на универсальных стереофотограмметрических приборахОбщие сведения5.43. Целесообразность и возможность применения того или иного метода камеральной обработки наземных фотоснимков зависит от ряда обстоятельств, из которых основными являются требования к детальности графического изображения сооружения, параметрам выполненной наземной фототеодолитной съемки (размеры базисов фотографирования и угловых элементов ориентирования относительно фронтальной плоскости проекции), наличие тех или иных обрабатывающих стереофотограмметрических приборов. 5.44. Обработку снимков сложных архитектурных сооружений, имеющих значительное количество деталей, целесообразно вести на универсальных стереофотограмметрических приборах. Наиболее применимы для этой цели универсальные приборы, предназначенные для обработки аэрофотоснимков, такие как стереопроектор, стереограф, стереопланиграф, стереометрограф. Из них наиболее пригодным следует считать стереопланиграф, который позволяет обрабатывать снимки с наибольшими значениями углов α и ω и коэффициентом увеличения. Некоторым недостатком стереопланиграфа является то, что на нем можно обрабатывать снимки только с определенными значениями фокусных расстояний (210, 194, 152, 100 мм), причем для каждого нового значения фокусного расстояния необходимо иметь соответствующую этому значению проектирующую камеру. 5.45. Универсальные приборы типа СПР, СД или стереометрограф предназначены для обработки плановых аэрофотоснимков, полученных с относительно длинных базисов фотографирования. В связи с этим на таких приборах возможна установка базисных компонентов bXмин ≥ 20 мм, bYмакс = bZмакс ≤ 13 мм (для стереометрографа ±15 мм). Базисные компоненты для установки на СПР вычисляются по формулам:
где В - базис фотографирования; 1:mr - горизонтальный масштаб создаваемой на приборе стереомодели; φ - угол отклонения оптических осей от нормали к базису фотографирования; ∆h - превышение правого центра проекции над левым. Согласно формуле (89),
При φ = 0°, bXмин ≥ 20 мм, f = 200 мм получим:
откуда следует, что наземная фотосъемка должна выполняться при условии, что съемочные базисы должны быть не менее 0,1 максимального отстояния. Заменив в формулах (89) ∆h на Bsinγ, получим для углов v и φ:
При bYмакс = bZмакс = 13 мм, B/Y = 1/10, f = 200 мм получим vмакс = φмакс ≤ 37°, а при B/Y = 1/6 - vмакс = φмакс ≤ 23°. Таким образом, углы наклонов базисов v и отклонения φ оптической оси от нормали к базису могут устанавливаться в довольно широких пределах. Чем длиннее съемочный базис, т.е. чем больше показатель B/Y, тем жестче допуски к расположению базиса относительно горизонта и фронтальной плоскости проекции. 5.46. Графомеханический метод создания фронтальных планов на стереоавтографе позволяет обрабатывать наземные фотоснимки, полученные при горизонтальных оптических осях фотокамер, причем оптические оси могут располагаться нормально к базису, быть равнонаклоненными, конвергентными (до γ < +5g) или дивергентными (γ < -2g). На стереоавтографе 1318EL имеется возможность проектировать сфотографированный участок местности не только на горизонтальную плоскость, как при создании топографических карт, но также и на отвесную плоскость, что отвечает задаче составления фронтального плана. Недостатком использования стереоавтографа 1318EL для создания фронтальных планов является то, что конструкция прибора позволяет создавать фронтальный план участка в проекции на фронтальную плоскость, строго перпендикулярную левой оптической оси. 5.47. Что касается стереометрографа, то он позволяет составлять фронтальный план по наземным фотоснимкам при отклонении оптической оси левого фотоснимка от нормали к фронтальной плоскости проекции в пределах 5° и обрабатывать фотоснимки, полученные при нормальном и равномерно отклоненном случаях съемки. Обработка снимков на универсальных стереофотограмметрических приборах включает следующие операции: подготовительные работы; построение модели; внешнее ориентирование модели; составление фронтального плана; выполнение аналого-аналитических измерений. Подготовительные работы5.48. Подготовительные работы заключаются в получении исходных данных и материалов, составлении рабочего проекта обработки фотоснимков, подготовке приборов и выполнении необходимых расчетов. Для стереофотограмметрической обработки фотоснимков необходимо иметь следующие материалы: негативы фотосъемки; контактные отпечатки с наколами точек геодезического обоснования и контрольными точками; каталоги координат и высот геодезических и контрольных точек; схему фототеодолитной съемки с расположением фотостанций и их номера, длины базисов, геодезические и контрольные точки (их номера); координаты и высоты концов съемочных базисов; дирекционные углы базисов и съемочных осей, углы скоса оптических осей. 5.49. В итоге составляют каталоги координат (табл. 16) и высот фотостанций, геодезических и контрольных точек, а также стереограмму (табл. 17). Таблица 16
В графе «Примечание» каталога координат в необходимых случаях дается зарисовка контрольных точек или сведения о них. Обработка снимков на стереопроектореОриентирование снимков5.50. Построение модели начинается с укладки негативов (диапозитивов) в кассеты снимкодержателей. Негативы должны быть установлены эмульсией вниз, диапозитивы - эмульсией вверх. Главные точки снимков должны совпадать с центрами вращения кассет с точностью, определяемой формулой
где δx - допустимое взаимное искажение координат точек снимка, вызванных погрешностью центрирования; ∆Y - глубина сооружения; Y - отстояние от средней плоскости. Допустимые значения погрешности центровки снимков приведены в табл. 18 при δx = 0,01 мм. Таблица 18
5.51. Центрирование снимков можно выполнять различными способами. При ∆Y < 1/10Y и при съемке с верхним положением объектива на негативе карандашом проводят линию через верхнюю и нижнюю координатные метки. Затем параллельно горизонтальным меткам через указатель положения объектива также проводится линия. Точка пересечения линий будет представлять начало координат снимка. В кассету прибора снимок закладывается так, чтобы начало координат снимка и центр вращения кассеты совпадали. При глубине сооружения ∆Y = (1/10 - 1/5)Y главная точка наносится на снимок с помощью стереокомпаратора. С этой целью снимок устанавливается на кассету стереокомпаратора эмульсией вверх. Снимок ориентируется по координатным меткам таким образом, чтобы линии, соединяющие метки, были параллельны соответствующим осям прибора. Для этого используют движения X и Z прибора и поворот кассеты на угол χ. После этого записывают отсчеты по шкале X при наведении визирной марки на верхнюю или нижнюю координатную метку, а затем совмещают измерительную камеру с изображением указателя горизонта (если объектив камеры в момент фотографирования не был смещен по высоте, визирную марку наводят на левую или правую координатную метку). Не меняя отсчеты по оси Z, устанавливают по шкале X ранее записанный отсчет X. Главная точка накалывается иглой под проекцией визирной марки. При накалывании главных точек снимка с точностью 0,05 мм и выше используются маркирующие приборы. Если маркирующий прибор отсутствует, при проектировании работ следует учесть, что продольные параллаксы будут определяться соответственно с большей погрешностью, а это увеличит ошибку определения координат Y. Если по расчетам окажется, что точность определения основных размеров аналого-аналитическим способом в этом случае будет недостаточна, основные размеры сооружения следует определять аналитическим способом. 5.52. При обработке снимков на стереопроекторе предварительно выполняется расчет установочных данных в такой последовательности: 1. Вычисляется средний масштаб снимка:
2. Определяется коэффициент увеличения модели:
Если коэффициент увеличения находится в пределах 0,5 - 2, обработка снимков может быть выполнена без подключения координатографа. При работе с координатографом вычисляется диапазон передаточных чисел для шестерен координатографа. Конструкцией стереопроектора передача вращения на выходные валы прибора осуществляется с коэффициентом увеличения 1,25. Поэтому диапазон передаточных чисел вычисляется по формулам:
Окончательное значение передаточного числа устанавливается в соответствии с наличием шестерен координатографа, при этом следует выбирать из всех возможных вариантов такое значение, которое удовлетворяет следующим условиям: не должны выбираться диапазоны передаточных чисел, близкие к крайним значениям; горизонтальный масштаб модели должен быть кратным 10, что удобно для предварительного масштабирования модели; вычисляемое в последующем значение базиса проектирования не должно выходить за пределы 20 - 200 мм; модель по глубине должна находиться в пределах перемещения по высоте базисной каретки. 3. Вычисляется горизонтальный масштаб модели по формулам: при работе с координатографом MГ = 1,25iMП, (100) при работе без координатографа MГ = MП. 4. Вычисляется базис проектирования по формуле
где B - значение базиса фотографирования, измеренное в процессе выполнения полевых работ. 5. Базисная каретка устанавливается в среднее положение, что соответствует отсчету по шкале, равному 55 мм. 6. Фокусное расстояние F’ прибора устанавливается таким, чтобы измерительная марка касалась поверхности стереомодели (полученной при приближенном ориентировании) в точке, примерно соответствующей по глубине средней плоскости сооружения. Если в задание входит измерение сооружения по оси Y, то дополнительно вычисляются установочные данные для счетчика высот. 7. Определяется приближенный коэффициент преобразования модели:
8. Вычисляется приближенное значение вертикального масштаба модели:
9. Находятся табличные значения вертикального масштаба модели и шестерни для счетчика высот. 10. Вычисляется окончательное значение коэффициента преобразования:
11. Вычисляется окончательное значение фокусного расстояния прибора: F = fK. (105) 5.53. В соответствии с выполненными вычислениями устанавливаются шестерни на координатографе и счетчике высот с учетом мест нулей, значения базисов проектирования и фокусного расстояния прибора. Ориентирование снимков сооружений на универсальных приборах целесообразно выполнять способом, когда взаимное ориентирование снимков и внешнее ориентирование модели выполняются совместно. Совместное выполнение взаимного и внешнего ориентирования снимков можно осуществить, используя особенности геометрических форм сооружения и расположение опорных точек строго по стандартной схеме. Таким образом, взаимное и внешнее ориентирование снимков будет выполняться по точкам 1 - 4 (рис. 8,а) путем уничтожения поперечных параллаксов одновременно с поворотом модели, критерием для которого будет установление заданной разности или равенства отметок (отстояний) для точек сооружения. Для возможности использования совместного выполнения взаимного и внешнего ориентирования снимков на рис. 8,б представлены схемы расположения ориентирных точек с показом влияния соответствующих элементов ориентирования (или движений проектирующих камер) на измерение поперечных параллаксов (рис. 8,б) и на изменение положения измерительной марки по глубине (рис. 8,в) на соответствующих точках стереопары.
Рис. 8. Схема совместного влияния элементов взаимного и внешнего ориентирования 5.54. Снимки ориентируют монокулярно по нижней и верхней координатным меткам движением χЛ, χП. Затем ориентирование левого снимка уточняется по точкам 1 и 2 движением χЛ. Ориентирование правого снимка уточняется снижением bY по точке 2 и по точке 1 движением χП. Затем визируют монокулярно на точку 3 левого снимка и штурвалом X перемещают марку к точке 4. Если марка не совместилась по оси z с точкой 4, то совмещение устанавливается движением αЛ. В результате этого точки 3 и 4 будут расположены на одной оси x и левый снимок внешне ориентирован за продольный угол наклона. Аналогично устанавливается αП по точкам 3 и 4 при монокулярном рассматривании снимка. Возвращаются к точкам 1 и 2, уточняют ориентировку движениями χЛ, χП и bY. Несовпадение отметки на точке 1 уничтожается при стереоскопическом визировании движением bZП. Установка ωЛ, ωП выполняется по точкам 3 и 4. Если при визировании на точку 3 наблюдается только поперечный параллакс, то он устраняется движением ωЛ; при несовпадении отметки - движением ωП. Поперечный параллакс на точке 4 уничтожается движением ωП, при наличии несовмещения марки по глубине - движением ωЛ. 5.55. Затем вводятся децентрации, уточняются масштабирование и ориентирование. При окончательном ориентировании следует обратить внимание на то, чтобы модель не имела прогиба между точками 1 и 2 (устраняется движением αЛ или αП). Величина децентрации снимка рассчитывается по формулам:
где l - постоянная коррекционного механизма, определяемая из юстировок прибора; α', ω' - величины перемещения опорного пальца коррекционного механизма. Значения α', ω' определяются по формулам:
где (α'), (ω') - отсчеты по шкалам коррекционных механизмов; 30 - места нулей шкал коррекционных механизмов. Отсчеты по шкалам децентраций снимка вычисляются по формулам:
где MOdx, MOdz - места нулей шкал децентраций снимков. 5.56. Требования к точности введения децентрации из-за влияния угла наклона снимка при плоском сооружении определяются на основании формулы
Подсчитанные по формуле (109) значения δ(∆x) при δx = 0,005 мм, x = 80 мм и f = 200 и 100 мм приведены соответственно в табл. 19 и 20. Таблица 19
Таблица 20
Требования к точности введения децентрации, обусловленные влиянием глубины сооружения и угла наклона (угла непараллельности) снимка, различны. Поэтому за окончательный допуск следует для конкретных условий брать более жесткий. При составлении только графического плана требования к точности введения децентрации и центрирования снимков могут быть повышены в соответствии с формулой
где δX - допустимая погрешность графического плана, обусловленная погрешностью введения децентрации; δx - допустимое соответствующее искажение на снимке; R = m/MПЛ - коэффициент увеличения масштаба плана по отношению к масштабу снимка. При δx = 0,005 мм, δX = 0,2 мм, R = 5 получим
5.57. После окончания взаимного ориентирования снимков и горизонтирования модели следует выполнить контроль ориентирования. Контроль ориентирования выполняется по оценке остаточных поперечных параллаксов на стандартных точках: на точках, лежащих на наибольшем отстоянии от них по глубине; на точках, лежащих посредине между ними. Остаточный поперечный параллакс не должен превышать 0,015 мм. Ориентирование считается законченным, когда отступление точек от общей плоскости по глубине (или изменение резкости глубин) не будет превышать 1/3000Y. Правильность взаимного ориентирования и горизонтирования должна быть проверена измерением глубин точек (отметок) не только на стандартных, но и на точках, лежащих между ними (для контроля прогиба модели). Внешнее ориентирование модели5.58. Внешнее ориентирование модели заключается в ее масштабировании. Значение базиса проектирования устанавливается по заданному масштабу модели и измеренному значению базиса проектирования в натуре. При отсутствии погрешностей юстировки прибора, измерения базиса, установки снимков в кассетах и т.д. полученное значение базиса должно быть окончательным. Однако практически всегда возникает потребность в выполнении масштабирования путем незначительного изменения базиса проектирования. Масштабирование выполняется в такой последовательности. Стереоскопически визируют на контрольную точку (например, точку 1 на рис. 8,а). Затем, перемещая основу, совмещают с иглой координатографа (или чертежного устройства базисной каретки прибора) соответствующую точку на основе. Стереоскопически визируют на другую контрольную точку, наиболее удаленную от первой (точка 2 на рис. 8,б). Основу на координатографе поворачивают вокруг точки 1, чтобы игла координатографа попала на линию точек 1 и 2. Если при этом игла координатографа не совпала с точкой 2, то изменяется базис проектирования. Масштабирование выполняется методом приближения и считается оконченным, когда игла координатографа будет совмещаться с контрольными точками с погрешностью не более 0,3 мм. 5.59. Если кроме составления графического плана необходимо выполнить аналого-аналитические измерения, то масштабирование следует выполнять по счетчику X или Z (у приборов, предназначенных для обработки аэроснимков, счетчиком Z будет являться счетчик Y). Для этого необходимо знать расстояние между контрольными точками в масштабе модели l = L/M, где L - расстояние на сооружении, приведенное к основной вертикальной плоскости сооружения. Масштабирование выполняется в такой же последовательности, как и при масштабировании по точкам основы. Разница заключается в том, что при визировании на точки модели берут отсчеты по счетчику и, если разность отсчетов не равна расстоянию l между этими точками в масштабе модели, изменяется базис проектирования. Масштабирование считается законченным, когда разность отсчетов по счетчику будет равна значению l с точностью 0,02 мм. Для удобства можно при визировании на одну из точек ставить на счетчике отсчет 0,00, тогда при визировании на вторую точку отсчет покажет расстояние между точками в масштабе построения модели (направление изменения показаний счетчика следует согласовать с направлением базисной каретки). После выполнения масштабирования необходимо проверить сохранность взаимного ориентирования и горизонтирования. Если возникли небольшие поперечные параллаксы, то на точках 1 и 2 они уничтожаются движением bY, а на точках 3 и 4 - движением bZ. Если возникло нарушение горизонтирования, то оно устраняется соответствующими движениями (см. рис. 8,в). Составление фронтального плана5.60. По окончании внешнего ориентирования модели устанавливают планшет и выполняют рисовку контуров сооружения и других элементов ситуации. Для нанесения криволинейных контуров совмещают измерительную марку с точкой контура и включают (с помощью ножной педали) магнит держателя карандашного устройства, в результате чего острие карандаша опустится на планшет. Затем с помощью штурвалов и ножного диска перемещают марку по выбранному контуру модели, внимательно следя за тем, чтобы марка все время была стереоскопически совмещена с линией контура. Контуры правильной геометрической формы рекомендуется рисовать точечным способом. Для этого измерительную марку прибора совмещают с угловыми точками, положение точек отмечают на планшете и по ним вычерчивают контур. Если рабочая площадь стереопары перекрывает несколько планшетов, то, закончив составление одного планшета, закрепляют две-три связующие точки, а затем их переносят на соседний планшет, используя при этом прямоугольную разграфку в единой системе координат. После этого, не вынимая снимков из прибора и не нарушая их ориентировки, производят ориентирование второго планшета по общим точкам и продолжают составление фронтального плана. В случае, когда фронтальный план сооружения составляется из нескольких перекрывающихся стереопар, намечают связующие точки в зоне перекрытия стереопар и по ним производят объединение отдельных моделей. При необходимости на контурных точках измеряются отстояния и высоты с использованием для этого соответствующих шкал прибора. Выполнение аналого-аналитических измерений5.61. Аналого-аналитические измерения заключаются в визировании на точки сооружения с отсчитыванием по шкалам прибора X, Z, Y (шкала Y соответствует шкале высот при работе на универсальных приборах, предназначенных для обработки аэроснимков). Причем для каждой точки берутся только те отсчеты, которые необходимы для определения размеров сооружения. Например, если составляется профиль сечения сооружения горизонтальной плоскостью, то берется только один отсчет по оси Z (поскольку для всех точек этот отсчет будет одинаков) и для всех точек отсчеты по осям X, Y. Если определяются высоты конструкций, то берутся отсчеты только по оси Z. Если необходимо определить расстояние по наклонной линии, то следует брать отсчеты по всем шкалам и т.д. Отсчеты по шкалам записываются в журнал. Номера точек следует проверять на вычерченном плане или делать соответствующий абрис. При выполнении аналого-аналитических измерений удобно при визировании на начальную точку ставить на счетчике нулевой отсчет. Направление движения базисной каретки должно быть согласовано с изменением отсчетов по шкалам X, Z счетчиков приборов. Отсчеты X, Z уменьшаются на знаменатель горизонтального масштаба модели для получения размеров в натуре. Отсчеты по шкале Y остаются без изменений. Для получения тех или иных размеров по какой-либо координатной оси сооружения берется разность значения в журнале. Определение наклонного расстояния выполняется по формуле
Особенности обработки снимков на стереографе СДУстановка снимков5.62. Требования к точности центрирования снимков в кассете стереографа СД такие же, как и для стереопроектора СПР. Снимки закладываются в кассеты таким образом, чтобы при укладке кассет на соответствующие каретки прибора эмульсионная сторона была обращена вниз (от оптической наблюдательной системы), перекрытием в разные стороны. На рис. 9,а показана стереопара снимков, на рис. 9,б снимки установлены в кассеты прибора. При рассматривании снимков через наблюдательную систему прибора они должны наблюдаться так, как показано на рис. 9. Расчет установочных данных для СД выполняется в следующем порядке. 1. Вычисляется приближенное значение базиса проектирования:
где B - значение базиса фотографирования, измеренное в натуре; YСР - приближенное значение отстояния до средней плоскости сооружения. 2. Вычисляется приближенное значение знаменателя горизонтального масштаба модели:
3. Вычисляется приближенный коэффициент увеличения модели по отношению к масштабу плана:
4. По таблицам шестерен к координатографу стереографа находится значение коэффициента увеличения горизонтального масштаба модели Kув ближайшее к вычисленному приближенному значению Kув, и выбираются шестерни а и б, которые устанавливаются затем на оси прибора и координатографа.
Рис. 9. Схема расположения снимков в кассетах стереографа 5. Вычисляется окончательное значение знаменателя горизонтального масштаба модели: MГ = MПKув. (115) 6. Вычисляется окончательное значение базиса проектирования:
5.63. Если в задачу работ входит определение размеров сооружения по глубине, т.е. по оси Y, то выполняется расчет установочных данных для счетчика высот и фокусного расстояния прибора в соответствующей последовательности. 1. Рассчитывается приближенное значение коэффициента преобразования модели:
где F - номинальное значение фокусного расстояния прибора, равное для СД - 130 мм. 2. Вычисляется приближенное значение вертикального масштаба модели:
3. По таблицам шкал и шестерен выбирается окончательное значение MB (наиболее близкое к вычисленному), шкалу высот и шестерни «правую» (устанавливается на ходовой винт базисного устройства) и «левую» (устанавливается на винт счетчика высот). 4. Вычисляется окончательное значение коэффициента преобразования модели:
5. Вычисляется окончательное значение фокусного расстояния прибора: F = Kf. (120) 6. Вычисляется поправка в номинальное значение фокусного расстояния прибора: δF = F - F'. (121) Найденное значение δF устанавливается на микрометренном винте каретки приращения фокусного расстояния прибора. 5.64. После установки базиса, шестерен, δF и выполнения приближенного ориентирования проверяется расположение модели по глубине, т.е. возможность стереоскопического наведения марки на точки ближнего и дальнего планов. Если это условие не выполняется в небольших пределах, то следует несколько уменьшить базис проектирования и выполнить новый расчет установочных данных. Если модель имеет значительную глубину, то обработка снимков выполняется по зонам, причем в отличие от СПР переход к следующей зоне выполняется путем изменения базиса проектирования, тогда как при работе на СПР - изменением фокусного расстояния прибора. 5.65. Все остальные процессы обработки снимков на СД выполняются аналогично работе на СПР, за исключением вычисления значений децентраций снимков. При работе на СД децентрации снимков вычисляются по формулам:
где K = F/f - коэффициент преобразования модели; (α), (ω) - перемещение микрометренных винтов коррекционных плоскостей прибора. Оцифровка шкал микрометренных винтов коррекционных плоскостей прибора и децентраций выполнена таким образом, что знаки изменения отсчетов от места нулей должны сохраняться. Значения децентраций выбираются из специальных таблиц, которые составлены в отсчетах по микрометренным винтам коррекционных плоскостей и децентраций для мест нулей 10 мм. Таблицы составлены для F = 130 мм. Однако фактическое значение фокусного расстояния прибора может отличаться на величину, которая может достигать 3 мм. Поэтому в значениях ∆x, ∆z следует вводить соответствующие поправки по формулам:
При положительном значении δF значение отсчета по винту децентрации, найденное по таблице при ∆x (∆z) < 10, следует увеличить на величину поправки, а при ∆x (∆z) > 10 - уменьшить. Поправку следует вводить только при фокусном расстоянии фотокамеры f ≤ 100 мм и когда она больше по величине допуска к точности центрирования и введения децентрации (см. табл. 20). Обработка снимков на стереоавтографе модели 1318ELОбщие сведения5.66. Построение модели на стереоавтографе начинается с установки снимков на снимкодержатели прибора. Снимок, полученный с левой точки базиса фотографирования, укладывают на левый снимкодержатель, с правой - на правый снимкодержатель. Для этого снимкодержатель снимают с каретки прибора и ставят на световой пульт инструментальной тумбочки, входящей в комплект стереоавтографа. На стекло снимкодержателя укладывают негатив эмульсией вниз (диапозитивы укладывают эмульсией вверх). Снимки центрируются таким образом, чтобы координатные метки точно совпадали со штрихами на стекле снимкодержателя. Если метки 1 - 4 (рис. 10) одновременно не совмещаются со штрихами, снимок устанавливают так, чтобы величины несовмещения на точках 3 и 4 были ничтожно малыми. После этого снимкодержатели укладывают на каретку прибора.
Рис. 10. Центрировка снимка в снимкодержателе 5.67. На отсчетных устройствах прибора устанавливают элементы ориентирования снимков. На индикаторах фокусного расстояния левых линеек устанавливают отсчеты, равные фокусному расстоянию f1 левого снимка, на индикаторах правых линеек - отсчеты, равные фокусному расстоянию f2 правого снимка. На левых и правых компенсаторах смещения объектива ставят отсчеты δz1 и δz2, равные величинам смещения объектива фототеодолита от центрального положения на соответствующих снимках. Эти значения берут из журнала фототеодолитной съемки или измеряют на снимке как расстояние от координатной метки до изображения высотной марки. На конвергентном устройстве устанавливают нулевой отсчет, на индикаторах базисных составляющих - значения bX, bY и bZ, вычисляемые по формулам:
Значения bY в зависимости от направления скоса устанавливают на соответствующих частях шкал индикаторов bY. Для скоса влево отсчеты устанавливаются на участке шкалы со стрелкой с индексом L, для скоса вправо - с индексом R. Шкала индикатора вертикальной составляющей разделена на два участка - для положительных и отрицательных значений bZ. Если неизвестно значение превышения bZ, устанавливают значения bX и bY и совмещают стереоскопически измерительную марку с контурной точкой на среднем плане модели. Поперечный параллакс устраняют вращением bZ. 5.68. Максимальные значения базисных составляющих при различных масштабах модели, которые можно установить на стереоавтографе 1318EL, приведены в табл. 21. Таблица 21
Передаточные отношения между обрабатывающим прибором и координатографом приведены в табл. 22. 5.69. Мостик отстояний с помощью штурвала Y перемещают в положение Y = 2f и закрепляют зажимным винтом. С помощью штурвала X конвергентного устройства γ совмещают одновременно левую и правую измерительные марки с центральными крестами кассет, видимых через негативы. Если негативы плотные, то совмещают измерительные марки с изображениями верхней или нижней координатной метки. После этого поочередно наводят левую и правую измерительные марки прибора на координатные метки 1 и 2 левого и правого снимков и берут отсчеты со шкалы VxЛ1,2 и VxП1,2 Таблица 22
По результатам измерений находят:
которые используют для вычисления поправок:
где lx = 0,25(VxЛ2 - VxЛ1) Исправленное за неприжим фокусное расстояние правого снимка находят по формуле f"П = f'П + δF (127) и устанавливают его на правых высотных и плановых индикаторах фокусных расстояний. После этого наводят правую измерительную марку на координатные метки 3 и 4 правого снимка, берут отсчет VxП3,4, изменяют его на величину ∆x (126) по формуле V'xП3,4 = VxП3,4 + ∆x (128) и устанавливают на шкале X. Используя сдвиг правого снимка вдоль оси X, центрирующим винтом правого снимкодержателя совмещают координатные метки 3 и 4 с правой измерительной маркой. Левую марку штурвалом X вновь совмещают с координатными метками 3 и 4, а несовмещение правой марки с соответствующими метками на правом снимке устраняют с помощью конвергентного устройства. Контролем правильности устранения влияния неприжима является отсутствие продольных параллаксов на всех координатных метках. Допустимая величина продольного параллакса не должна превышать половины диаметра марки. В противном случае процесс устранения влияния неприжима повторяют заново. 5.70. Масштаб модели выбирают в соответствии с расстояниями от левой точки базиса до ближней и дальней границ съемки и в зависимости от масштаба составляемого плана. При выборе масштаба модели на стереоавтографе рекомендуется пользоваться табл. 23. Таблица 23
5.71. Ориентирование планшета производят по направлению оптической оси, установочным точкам на оптической оси и контрольным точкам. Координаты установочных точек определяют по формулам:
где XS, YS - координаты станций фотографирования; α0 - дирекционный угол направления оптической оси; D - расстояние установочной точки от станции фотографирования. Планшет располагают так, чтобы направление оптической оси было приблизительно параллельно оси координатографа. При отключенных от ведущих винтов каретках X и Y координатографа марку микроскопа совмещают с ближней установочной точкой. Левую измерительную марку прибора совмещают с центральным крестом левой кассеты. Подключают каретку X координатографа к ведущему винту. Движением Y координатографа марку перемещают на дальнюю установочную точку, планшет разворачивают так, чтобы марка совпала с направлением оптической оси методом последовательных приближений; переходя от дальней точки к ближней, добиваются совпадения линий передвижений микроскопа с направлением оптической оси. В этом положении планшет закрепляют. Штурвалом Y устанавливают отсчет, равный расстоянию по одной из установочных точек в масштабе модели. Совместив марку микроскопа координатографа с этой точкой на планшете, подключают каретку Y координатографа к ведущему винту. Для контроля ориентирования планшета левую марку прибора последовательно наводят на изображения всех опорных точек и контрольных направлений. Несовмещение марки установочного микроскопа относительно точек, нанесенных по координатам на планшет, не должно превышать 0,2 мм. При больших отклонениях планшет разворачивают вокруг станции фотографирования или ближайшей к ней установочной точки таким образом, чтобы устранить смещения до указанной величины. 5.72. Внешнее ориентирование модели выполняют по корректурным точкам, расположенным по схеме, приведенной на рис. 11. Выполняют измерения координат опорных точек 1, 2, 5 и вычисляют по ним длины отрезков:
Сравнивают полученные отрезки с действительными длинами соответствующих линий, выраженных в масштабе модели, т.е.:
Рис. 11. Схема расположения корректурных точек при обработке снимков на стереоавтографе
находят разности Поправку в базисную составляющую bx определяют по формуле
Исправленное значение b'x = bx + ∆bx (134) устанавливается на шкале bx. После этого на счетчике Y устанавливают отсчет Y5 = l02-5 и монокулярно наводят левую марку на изображение опорной точки 5. При этом пространственная измерительная марка не будет стереоскопически совмещаться с изображением точки 5. Совмещения по оси Y добиваются изменением установки γ. После этого снова измеряют приборные координаты X и Y корректурных точек 1, 2, 5 и по формулам (132) вычисляют невязки ∆l1-2 и ∆lS2-5. Если полученные
невязки не превышают величины 5.73. Если после окончания выполнения предыдущего процесса измеренные отстояния на точках 1 и 2 будут отличаться одно
от другого более чем на VY = 0,5(V1 + V2) (135) и, не меняя его, добиваются стереоскопического касания измерительной маркой прибора точек 1 или 2 движением bY для плановых линеек. После этого снова измеряют V1 и V2 и, если
процесс заканчивают. Изменение установки bY свидетельствует об имевшей место при съемке непараллельности плоскости левого снимка фронтальной плоскости проекции, задаваемой опорными точками 1 и 2. Обнаруженную непараллельность плоскостей устраняют путем введения децентраций ∆x в левый и правый снимки. Величина децентрации определяется по формуле
где ∆bY - изменение установки базисной составляющей от начального, т.е. нулевого, значения. Если малый конец стрелки индикатора bY находится в зоне, которая обозначена индексом L, то это свидетельствует о наличии скоса влево, если в зоне R, то скоса вправо. В первом случае левый снимок с помощью центрирующих винтов смещается влево, а во втором - вправо на величину ∆x. При введении децентрации с точностью ±0,1 мм может быть использована металлическая линейка с миллиметровыми делениями. Для введения децентрации в правый снимок необходимо установить один из ранее записанных отсчётов Y1 или Y2, используя движения Х центрирующих винтов правого снимка, добиться стереоскопического касания измерительной марки данной точки. По неиспользованной
второй точке необходимо проверить правильность введения децентрации. Если полученный отсчет Y на точку совпадает с ранее записанным отсчетом Y* на нее же с точностью Обработка снимков при помощи способа преобразования связок проектирующих лучей5.74. Снимки, полученные фотокамерой UMK 10/1318, могут быть обработаны на стереоавтографе 1318EL при помощи способа преобразования связок проектирующих лучей. Сущность этого способа заключается в том, что искажение масштаба модели вдоль оси ординат, возникающее вследствие несовпадения величин фокусного расстояния камеры fK и фокусного расстояния, устанавливаемого на линейках развертывающего механизма стереоавтографа fП, компенсируется путем редукции передачи движения между развертывающим механизмом и координатографом стереоавтографа. Редукция движения вдоль оси ординат между развертывающим механизмом и координатографом осуществляется путем установки в редукторе координатографа пары шестерен, имеющей отношение передаточных чисел, равное поправочному переходному коэффициенту RY, который определяется зависимостью
Ввиду того, что фотокамера UMK 10/1318 имеет фокусное расстояние, равное примерно 100 мм, а установочные шкалы фокусных расстояний стереоавтографа 1318EL имеют пределы 155 - 200 мм, наиболее удобным следует считать коэффициент RY = 0,625, который соответствует паре шестерен с передаточными числами 65:104. Это значение коэффициента RY используется при соотношении масштабов модели и составляемого плана 1:1. При других соотношениях масштабов модели и плана поправочный коэффициент изменяется пропорционально коэффициенту увеличения масштаба плана относительно масштаба модели. 5.75. При составлении стереограммы для каждого базиса фотографирования вычисляется фокусное расстояние камеры fK и фокусное расстояние, устанавливаемое на шкалах стереоавтографа. Фокусное расстояние камеры UMK 10/1318 изменяется в зависимости от отстояния Y до плоскости наиболее резкого изображения и может быть вычислено по формуле fK = fconst + ∆f, (138) где fconst - постоянная камеры, регистрируемая на снимках; ∆f - приращение фокусного расстояния, зависящее от изменения фокусировки и выбираемое из табл. 24. Таблица 24
Фокусное расстояние, устанавливаемое на шкалах стереоавтографа fП, вычисляют по формуле
Устанавливаемые на шкалах стереоавтографа фокусные расстояния fП фотокамеры UMK 10/1318 (fconst = 98,88), изменяющиеся в зависимости от отстояния Y до плоскости наиболее резкого изображения, выбираются по табл. 25. 5.76. На конвергентном устройстве устанавливают нулевой отсчет. Установка высоты фотографирования производится при нулевом положении линейки высот. Отсчет высоты устанавливается по тому сектору шкалы, который соответствует масштабу модели. Таблица 25
Затем устанавливают вычисленные по формуле (139) значения фокусного расстояния fП на стрелочных индикаторах правых и левых линеек. Вычисленные базисные компоненты bx и by устанавливаются на стрелочных индикаторах мостика отстояний. В соответствии с выбранным соотношением масштабов стереомодели и плана по табл. 26 для каждой из осей координатографа определяется отношение передаточных чисел шестерен главного редуктора. Выбранные пары шестерен устанавливаются в редукторе координатографа. Исходя из необходимого передаточного коэффициента RY (см. табл. 26) устанавливаются рукоятки дополнительного редуктора координатографа в положение 1:1 или 1:2. 5.77. После установки шестерен в редукторе координатографа производят подсоединение кабелей сельсинов к разъемам стереоавтографа и координатографа. В зависимости от плоскости проектирования соединительные кабели подключают к разъемам согласно табл. 27. Плоскость проектирования XY, как правило, применяется при составлении топографических планов, обмерных планов сооружений на различных высотах сечения, вертикальных разрезов зданий и сооружений. Высоты при этом отсчитываются по счетчику высот стереоавтографа. Таблица 26
Таблица 27
Плоскость проектирования XZ применяется для составления планов фасадов зданий и сооружений, интерьеров, потолков. Отстояния (высоты) отсчитываются по счетчику Y стереоавтографа и вычисляются с учетом поправочного переходного коэффициента RY и масштаба стереомодели по формуле h = 0,625(Y2 - Y1)M, (140) где h - расстояние (превышение) между определяемыми точками по нормали к плоскости XZ; Y2, Y1 - отсчеты по счетчику стереоавтографа при визировании на первую и вторую точки; M - знаменатель масштаба стереомодели. 5.78. Для отображения снимаемой поверхности объекта в третьем (высотном) измерении проводят горизонтали - линии, соединяющие точки поверхности, одинаково удаленные от плоскости, параллельной плоскости XZ и проходящей через начальную точку отсчета отстояний (высот). За начальную точку отсчета отстояний (высот) на отдельных чертежах может быть принята точка поверхности объекта, наиболее или наименее удаленная от фотокамеры. Для проведения горизонталей по счетчику Y берется отсчет на начальную точку, после чего для каждой горизонтали вычисляются установочные отсчеты по формуле
где YH - установочный отсчет для заданной горизонтали, мм; Y0 - отсчет при визировании на начальную точку, мм; H - высота горизонтали над начальной точкой, мм; M - знаменатель масштаба стереомодели; ∆YH - приращение по оси ординат стереоавтографа для заданной высоты горизонтали относительно начальной точки или высоты смежной горизонтали, мм. Приращения по оси ординат для смежных горизонталей при построении стереомоделей в наиболее часто встречающихся масштабах приведены в табл. 28. Таблица 28
Продолжение табл. 28
5.79. Плоскость проектирования ZY применяется при составлении планов отдельных фрагментов интерьеров зданий. Высоты точек относительно плоскости, параллельной плоскости ZY и проходящей через начальную точку, вычисляются по формуле H = (X - X0)M, (142) где H - высота определяемой точки над начальной; X - отсчет по счетчику при визировании на определяемую точку; X0 - отсчет по счетчику при визировании на начальную точку; M - знаменатель масштаба стереомодели. Обработка снимков на стереопланиграфе5.80. Стереопланиграф - высокоточный универсальный прибор, позволяющий обрабатывать плановые и перспективные аэроснимки, а также наземные фотоснимки, снятые в направлении перпендикулярно или со скосом относительно базиса, со смещением горизонта или без него, а также с параллельными или конвергирующимися, горизонтальными или наклонными направлениями съемки. Обработка снимков ведется с сохранением связок проектирующих лучей, существовавших в момент аэрофотосъемки, для чего в комплект прибора входят сменные камеры с фокусными расстояниями 100 и 200 мм. Кроме того, фокусное расстояние камеры можно менять в небольших пределах путем перемещения прикладной рамки камеры относительно объектива. Результаты обработки снимков могут быть получены в графическом виде (план или профиль), а также в цифровом виде с помощью коордиметра, который, работая по восьми определенным программам, позволяет автоматизировать процессы ориентирования снимков и вести запись пространственных координат в цифровой форме или на перфоленту. 5.81. Перед началом обработки фототеодолитных снимков ось Z прибора переключается на ось Y, при этом на счетчике Y устанавливается отсчет, соответствующий величине отстояния. При установке негативов в кассетах прибора они смещаются по оси Z относительно своего центрального положения на величину, равную смещению объектива камеры от нулевого положения в момент фотографирования. Смещение производится в положительном направлении оси, если объектив был смещен вверх, и в отрицательном при смещении объектива вниз. На шкалах фокусных расстояний устанавливают соответствующие значения fK съемочных камер. На отсчетных устройствах углов наклона ω, скоса φ и поворота снимка χ обеих камер устанавливают нулевые отсчеты. Если угол конвергенции при съемке не был равен нулю, то на отсчетном устройстве скоса правой камеры устанавливают значение угла конвергенции. На шкалах bYЛ и bZЛ левого снимка устанавливают нулевые отсчеты, а на устройствах bYП и bZП правого снимка и устройстве bx - величины базисных компонентов в масштабе модели. При левом скосе значение bY отрицательно, при правом - положительно. В случае, когда вычисленное значение базисного компонента превышает ±20 мм (диапазон установок bYЛ и bYП), отсчетное устройство левого снимка следует поставить на 0 при скосе влево или на 40 при скосе вправо. Тогда нулевым отсчетом шкалы bYП также будут соответственно 0 или 40 мм, что позволяет установить значение базисного компонента величиной до 40 мм в масштабе модели. Остаточные вертикальные параллаксы уничтожают вращением винта bZ правой камеры. После этого в коробке передач устанавливают шестерни, соответствующие выбранному масштабному соотношению. Масштаб модели выбирается в соответствии с расстоянием от левой точки базиса до ближайшей и дальней границ съемки и масштаба составляемого плана. При выборе масштаба модели на стереопланиграфе следует пользоваться табл. 23. Ориентирование планшета на координатографе производится аналогично ориентированию на стереоавтографе. Корректирование стереомодели выполняется по контрольным точкам, при этом погрешность в величине базиса устраняется изменением базисной составляющей bx; погрешность в угле скоса - изменением базисной составляющей bY; ошибка конвергенции - изменением установки φ правого снимка; погрешность в угле наклона - изменением общего угла наклона проектирующих камер. При значительных расхождениях точек по высоте можно производить горизонтирование модели так, как это выполняется при обработке аэрофотоснимков. Особенности обработки снимков на стереометрографе5.82. Стереометрограф фирмы «Цейсс» (ГДР) - высокоточный универсальный прибор механического типа, предназначен для создания топографических карт средних и крупных масштабов при строгом восстановлении связок проектирующих лучей. На приборе можно обрабатывать аэрофотоснимки и наземные фотоснимки формата 23×23 см и меньше с углами наклона до 5° и с фокусным расстоянием камер от 98 до 215 мм. Обработка наземных фотоснимков на стереометрографе при создании фронтальных планов осуществляется аналогично обработке плановых аэрофотоснимков. Прибор позволяет составлять фронтальный план по наземным снимкам при отклонении оптической оси левого фотоснимка от нормали к фронтальной проекции в пределах 5°. На стереометрографе обрабатывают фотоснимки, полученные при нормальном и равномерно отклоненном случае наземной фотосъемки. Конструкция прибора накладывает некоторые ограничения на обработку фотоснимков равномерно отклоненного случая съемки. Это связано с тем, что базисная составляющая прибора bZ имеет ограниченный диапазон перемещений ±15 мм. Расширить возможность стереометрографа позволяет использование способа аффинной обработки фотоснимков, при котором масштабы модели по оси Z прибора (по отстоянию при обработке наземных снимков) и в плоскости XY устанавливаются неодинаковыми с введением коэффициента аффинности
где F и f, установленное фокусное расстояние соответственно прибора и съемочной камеры, мм; mФ, mY - знаменатели численных масштабов стереомодели в плоскости прибора XY и по отстоянию. Базисную составляющую также изменяют на коэффициент аффинности
где B - базис съемки; φ - угол скоса. Аффинное искажение стереомодели устраняют с помощью передаточного соотношения V от прибора к координатографу. В этом случае ось Z прибора подключают к оси Y координатографа, а ось X - к оси X, соблюдая передаточное соотношение
5.83. При заданном масштабе плана 1:mП знаменатель масштаба стереомодели mm задают в пределах 0,1mП ≥ mm ≤ 5mП и выбирают наименьшим в зависимости от минимального и максимального отстояний при съемке. При выборе масштаба модели следует иметь в виду, что диапазон отстояний YФ наземной стереофотограмметрической съемки соответствует в стереометрографе перемещению каретки Z от 130 до 310 мм. При использовании на передаточном механизме чертежного стола передаточного соотношения 0,5х коэффициенты передачи между обрабатывающим прибором и чертежным столом соответственно увеличатся вдвое. Коэффициенты передачи между обрабатывающим прибором и чертежным столом:
Определив окончательное значение масштаба модели Mm и коэффициент передачи K, производят установку пар зубчатых колес (шестерен) для передач по осям X и Z. В этом случае отношение количества зубьев выбранных шестерен должно равняться коэффициенту K. Например, если K = 2, то выбирают пару шестерен 40 (верхняя) и 80 (нижняя). 5.84. После установки базисной составляющей bx производят ориентировку снимков по χ. Для этого монокулярно наблюдают левый снимок и совмещают измерительную марку штурвалами X и Y с верхней координатной меткой. Перемещают марку к нижней метке и величину несовмещения марки с меткой устраняют наполовину ручным приводом χ, наполовину движением штурвала X; перемещают марку к верхней метке и вновь устраняют несовмещение марки с меткой и т.д. Эти действия выполняют несколько раз, добиваясь того, чтобы при перемещении марки штурвалом Y она поочередно совмещалась с верхней и нижней координатными метками снимка. Аналогично исправляют установку χ правого снимка. Если превышение одного конца базиса фотографирования над другим не известно, то при стереоскопическом наведении измерительной марки прибора на точку, расположенную вблизи от линии, соединяющей главные точки снимков, устраняют видимый поперечный параллакс движением bY прибора. 5.85. Корректирование модели выполняется по контрольным точкам, при этом погрешность в величине базиса устраняется изменением базисного компонента bx, погрешность в угле скоса - изменением базисного компонента bx, ошибка конвергенции - изменением установки угла φ правого снимка; погрешность в угле наклона - изменением поперечного угла наклона левого и правого снимков. Дальнейшая обработка снимков в зависимости от выбранной схемы расположения контрольных точек выполняется аналогично обработке снимков на стереоавтогоафе и стереопланиграфе. Обработка снимков на топокарте5.86. Топографический стереобрабатывающий прибор «Топокарт» фирмы «Цейсс» (ГДР) предназначен по своему основному назначению для мелкомасштабного и среднемасштабного картографирования по аэроснимкам. Большой диапазон фокусных расстояний обрабатываемых снимков от 50 до 215 мм, форматы снимков от 4×4 до 23×23 см, сменные приводы, сменные связи с координатографом, регулируемое передаточное отношение позволяют использовать «Топокарт» для обработки наземных снимков. Так как форматы наземных снимков отличаются от форматов аэроснимков, то установка их в снимкодержателях представляет некоторое затруднение. В большинстве случаев (если нет специальных снимкодержателей с метками, соответствующими расстояниям меток на съемочных камерах) используют стандартные снимкодержатели. Для этого совмещают главные точки снимков (предварительно определив их положение на снимках) с центральными крестами на стеклах кассет прибора. При определении положения главной точки на снимках необходимо учитывать возможный сдвиг объектива во время съемки. Наземные снимки укладывают в кассеты прибора так, чтобы линия горизонта, изобразившаяся на снимках, была обращена к лицевой панели эмульсионным слоем вниз. При обработке диапозитивных снимков левый снимок укладывается на левую кассету, правый снимок - на правую. При обработке негативов левый снимок помещается на правой кассете, правый - на левой кассете. 5.87. Масштаб модели выбирают в зависимости от масштаба составляемого плана и возможности охвата рабочего диапазона Z от 70 до 320 мм. Допустимые масштабы модели:
где zмакс и zмин - заданные пределы охватываемого диапазона расстояний на местности. Базисные составляющие определяются по формулам:
где b - длина базиса съемки на местности; mm - знаменатель выбранного масштаба модели; φ - угол скоса; ∆h - разность высот обеих точек стояния камеры. При нормальном случае съемки φ = 0, следовательно:
При обработке стереопары счетчик bZ должен показывать при скосе камеры вправо для диапозитивов 30 - bZ, для негативов 30 + bZ; при скосе влево - для диапозитивов 30 + bZ, для негативов 30 - bZ. Счетчик bY должен показывать 30 + bY, если правая точка стояния выше левой для диапозитива, для негативов 30 - bY; если левая точка стояния выше правой, для диапозитивов 30 - bY, для негативов - 30 + bY. 5.88. Так как элементы ориентирования наземных снимков известны с достаточной точностью, ориентирование модели на приборе заключается практически в ориентировании планшета на координатографе. Корректирование модели и ориентирование планшета производятся аналогично соответствующим процессам на стереоавтографе. Результаты обработки снимков могут быть выполнены графически или в виде цифровой, численной модели. Для этого в комплект прибора к координатографу подключается дополнительное электронное устройство «Орограф», позволяющее одновременно с дифференциальным трансформированием фотоснимка получать графическое изображение рельефа местности в виде штрихов различной толщины (0,1, 0,4 и 0,8 мм). Каждый штрих определенной толщины является интервалом между горизонталями. Положение горизонталей определяется линией, соединяющей начальные и конечные точки штрихов одинаковой толщины. Для получения цифровой характеристики модели и автоматической регистрации координат точек, служит коордиметр, который соединяет в себе регистрирующее, счетное, запоминающее и программное устройства. Обработка снимков на технокарте5.89. Технокарт предназначен, как и стереоавтограф, для обработки наземных фотоснимков. В отличие от стереоавтографа на нем значительно расширены пределы работы некоторых элементов установки. Это касается в первую очередь фокусного расстояния камеры от 50 до 215 мм. Эти пределы позволяют обрабатывать практически все принятые виды фотоснимков. Формат снимков может иметь максимальную величину 23×23 см. Отношение расстояний Yмакс:Yмин порядка 10:1 - самое крупное у всех известных приборов такого типа. Большие параметры установки bX - от 0 до 200 мм (у стереоавтографа - от 0 до 60 мм) значительно расширяют возможности обработки фототеодолитных снимков. 5.90. Установка снимков в кассетах прибора производится следующим образом: левый негатив помещается на левую кассету, правый - на правую; левый диапозитив - на правую кассету, правый - на левую таким образом, чтобы зона перекрытия располагалась всегда к центру прибора. При этом необходимо учесть величину смещения объектива во время съемки. Для этого на пластинке с марками выгравированы штрихи через 5 мм. При перемещении съемочного объектива из нулевого положения вверх фотоснимок следует переместить вверх, а при нижнем положении объектива снимок следует переместить вниз. 5.91. Значение базисных компонентов при нормальном случае съемки:
при конвергентном случае съемки:
В случае положительного угла конвергенции (отклонение вправо) для негативов при установке значения bY следует вычитать из 30 (MO шкалы bY составляет 30), а для отклонения влево - прибавлять к 30. Если правая точка базиса расположена выше левой, то значение следует прибавлять к 30. При обработке диапозитивов базисные составляющие bY и bZ определяются обратными действиями: если отклонение вправо, то на шкале bY устанавливается значение MO + bY. 5.92. Выбор масштаба модели зависит от заданного диапазона расстояний или масштабов плана. На приборе можно составлять планы в масштабах 1:50 - 1:50000. Если на технокарте обрабатываются фотоснимки, полученные фотокамерами UMK и SMK с некоторыми наклонами, то необходимо между обрабатывающим прибором и координатографом включить механические пересчетные передачи, т.е. преобразователь наклона. Ориентирование планшета, как и на стереоавтографе, производится по контрольным точкам или, если их нет, по направлению оптической оси левой фотостанции. Коррекция модели производится аналогично этим процессам на стереоавтографе. На технокарте кроме графического изображения плана можно подключить коордиметр для регистрации координат модели в виде перфолент в определенном коде или в виде открытого текста. Построение разрезов и профилей5.93. Разрез является линией пересечения с поверхностью сооружения секущих плоскостей, перпендикулярных вертикальной плоскости проекции. Профилем сооружения является линия пересечения секущих плоскостей, перпендикулярных горизонтальной плоскости проекции, с плоскостью сооружения. Построение разрезов и профилей можно выполнить на стереофотограмметрических приборах: стереоавтографе, стекометре, СПР, СД и др. Построение продольного разреза при i = 0 аналогично проведению горизонтали на высоте, соответствующей заданной отметке H (фотограмметрическое превышение ZФ). Его вычерчивают на планшете карандашным устройством координатографа после установки на шкале высот отсчета, соответствующего высоте H. При этом перемещение измерительной марки по модели обеспечивается движениями штурвалов X и Y. Съемка точек вертикальных профилей производится после того, как на планшете, закрепленном на столе координатографа, нанесены направления профилей (относительно оси сооружения). Этот вид профилирования состоит в перенесении на стереомодель сооружения направлений, намеченных на планшете. В задаваемом таким образом створе на стереомодели выявляют характерные переломы профиля и определяют их отметки. Положение снятой точки в плане отмечается наколом на планшете. Если направления снимаемых профилей параллельны направлениям фотограмметрических осей XФ и YФ, то расстояния от характерных точек профиля до оси сооружения определяют по формулам:
где t и M - исходная и снятая с профиля точки; XФ, YФ - значения координат точки профиля, снятые по шкалам прибора. 5.94. Работа по съемке точек начинается с того, что ассистент совмещает карандаш координатографа с точкой t оси сооружения (или другой исходной точкой) на планшете, а оператор движением ножного диска устанавливает марку на модель. Производят отчеты XФt (или YФt) и ZФt. Затем ассистент одним из маховичков чертежного стола перемещает марку в заданном направлении (при застопоренном другом маховичке). В это время оператор движением ножного диска удерживает марку на модели. Когда марка достигает следующего перелома профиля (M), производят отсчеты XФM (или YФM) и ZФM. Ассистент отмечает карандашом положение точки профиля на планшете и нумерует ее. Для наглядности положение точек профиля наносят на контактный отпечаток. При измерениях на стереоавтографе для этого используют дополнительное приспособление около левого снимкодержателя. В приспособление закладывают контактный отпечаток левого негатива. Закрепленный на столике контактный отпечаток ориентируют так, чтобы при монокулярной установке измерительной марки на координатной метке негатива острие карандаша над столиком совпадало с изображением на отпечатке. После этого любое положение марки на модели может быть отмечено на контактном отпечатке. Накол обводится кружком, у которого вписывают номер точки, ранее зафиксированный в ведомости. Составление панорамных чертежей5.95. Панорамы составляют для оценки общего архитектурного ансамбля города или его отдельных частей. Все панорамы должны быть построены в общей системе координат. 5.96. Методика выполнения полевых геодезических и фотосъемочных работ зависит от задания и методики последующей фотограмметрической обработки снимков. При обработке снимков на стереоавтографе 1318EL или технокарте следует учитывать, что построение панорамы возможно только в плоскостях, перпендикулярных оптической оси левого снимка. Поэтому перед выполнением полевых фотосъемочных работ следует предварительно определять координаты всех базисных точек и дирекционные углы базисов с точностью 20" - 30". Базисные точки накладывают на основу и намечают направления сечений. На каждом сечении определяют на ее концах координаты вспомогательных точек, по которым рассчитывают дирекционный угол сечения. Дирекционные углы сечений изменяют на 90° и вычисляют дирекционный угол всех оптических осей. Разность дирекционных углов базисов и дирекционного угла оптической оси левых снимков определяет углы скоса при фотосъемке. Предельные углы скоса не должны превышать предельных углов для данного типа фотокамеры. При применении универсальных приборов, предназначенных для обработки аэроснимков («Топокарта» «Стереометрографа» СПР, СД и др.), углы скоса могут отличаться от расчетных на значения, соответствующие допустимым углам обработки снимков на данном приборе, но не превышать значений, которые могут вызвать увеличение базисной составляющей bY (в системе координат фототеодолитной съемки) свыше его конструктивного значения. При обработке снимков внешнее ориентирование выполняют по двум-трем опорным точкам, располагаемым на дальнем плане вблизи намеченного сечения. Плановое положение точек может быть определено графически по планам застройки, высоты точек - по измерениям вертикальных углов с базисных точек. При необходимости получения панорам в центральной проекции обработку снимков выполняют на фототрансформаторе. К заданному масштабу приводят одну из линий сечения. Построение планов скульптур5.97. Стереосъемка планов скульптур может быть выполнена в зависимости от назначения работ при помощи фототеодолитов или стереофотограмметрических камер. Фототеодолитные снимки позволяют получить большую точность, поскольку они имеют больший формат кадра, чем стереофотограмметрические камеры. Стереофотограмметрические камеры используют для отдельных архитектурных деталей, небольших скульптур и съемки интерьеров. Полевые работы при съемке скульптур ведутся обычными способами; необходимо предусмотреть геодезические измерения для контроля элементов ориентирования при камеральной обработке. При съемке скульптуры с двух сторон или более важно наметить разграничительные плоскости, линии и точки так, чтобы при камеральной обработке можно было составить общие чертежи, разрезы и т.д. по обработке различных стереопар. Камеральную обработку снимков скульптур целесообразно выполнять на универсальных приборах. По снимкам скульптур в зависимости от назначения можно получить серии разрезов, профилей и планов скульптур в горизонталях. 6. АНАЛИТИЧЕСКИЙ МЕТОД ВЫПОЛНЕНИЯ АРХИТЕКТУРНО-СТРОИТЕЛЬНЫХ ИЗМЕРЕНИЙОбщие положения6.1. Аналитический метод, как наиболее точный, хотя и наиболее трудоемкий, используется для определения размеров основных деталей различных сооружений, обработки архивных снимков с неизвестными элементами ориентирования, деформаций сооружений при проектировании и испытании сооружений на моделях. Точность фотограмметрических работ зависит от параметров съемки (отстояния Y и базиса фотографирования B, случая съемки, фокусного расстояния фотокамеры, формата кадра), точности измерений снимков, точности введения поправок за нарушение элементов внутреннего и внешнего ориентирования и т.п. При выполнении полевых работ следует принимать оптимальные параметры съемки, обеспечивающие максимальную точность при заданном продвиге работ или заданную точность при максимальном продвиге работ. При камеральных работах необходимо применять методику введения поправок за нарушение элементов внутреннего и внешнего ориентирования, обеспечивающую их получение с погрешностью, не превышающей точности измерения снимков. В ряде случаев для повышения точности приходится выполнять многократную съемку сооружения и измерять снимки двумя-тремя приемами. На точность фотограмметрических измерений влияет и точность определения координат центров проекций фотокамер и контрольных точек, а также выбор числа контрольных точек и их расположение на сооружении. 6.2. Аналитическая обработка снимков может выполняться по различной методике в зависимости от полноты измерений (измеряются только XЛ, ZЛ, p или еще q), числа контрольных точек, способа определения и введения поправок за нарушение элементов внутреннего и внешнего ориентирования, случая съемки (нормальный, равномерно отклоненный, общий). Если с заданного отстояния точность определения координат не будет обеспечена, то с каждой фотостанции следует выполнять фотосъемку на несколько фотопластинок и измерения производить несколькими приемами. Точность определения координат и параллаксов точек снимков в этом случае можно рассчитать по формуле
где m1 - погрешность измерения снимков; m2 - искажение изображения, вызванное неплоскостностью фотопластинки и деформацией фотоэмульсионного слоя; m3 - погрешность изображения, вызванная влиянием дисторсии объектива; n - число приемов измерений; N - число снимков. Погрешность определения координат контрольных точек не должна превышать 1/3 - 1/5 заданной точности определения координат точек сооружения. 6.3. Требования к точности определения координат центров проекций во многом зависят от методики введения поправок за нарушение элементов ориентирования и глубины сооружения. Чтобы не использовать сложных уравнений поправок, целесообразно координаты центров проекции определять с погрешностями, не превышающими значений, получаемых по формулам:
где Y0 - отстояние до основной плоскости сооружений; ∆Y - глубина сооружения; x - максимальное значение координаты X (Z) на снимке; δx, δz - допустимые искажения координат точек снимка, обусловленные погрешностью определения координат центров проекции. 6.4. Для определения координат точек сооружений применяется как нормальный, так и конвергентный случай съемки. Сравнительный анализ точности этих видов съемки показал, что при измерениях по маркированным точкам отстояния Y при конвергентной съемке получаются при f = 200 мм точнее примерно в 1,5 раза. При измерениях по контурным точкам точность определения отстояния в том и другом случае примерно одинакова. При f = 100 мм при нормальном случае съемки точность определения координат в 1,5 - 2 раза выше. Точность определения абсцисс при f = 200 и 100 мм при нормальном случае съемки выше примерно на 30 %, чем в конвергентном. Плановое положение точки при нормальном случае съемки и f = 100 мм определяется точнее в 1,4 - 1,7 раза. При f = 200 мм при конвергентной съемке измерения по маркировочным точкам обеспечивают несколько большую точность, чем при нормальной. При измерениях по контурным точкам точность одинакова. Высоты точек получаются точнее при нормальном случае в 1,2 - 1,8 раза. 6.5. На основании анализа съемок можно дать следующие рекомендации. При f = 200 мм и конвергентной съемке захват сооружения по оси увеличивается примерно в 2,5 раза по сравнению с нормальной. Следовательно, при длинных сооружениях применение нормального случая съемки приводит к увеличению числа фотостанций и фотопластинок в 1,5 - 2 раза. При f = 200 мм применение конвергентного случая съемки при исследованиях сооружений дает повышение точности только при определении отстояний Y, если измерения ведутся по маркированным точкам. При f = 200 мм нормальный случай съемки целесообразно применять для съемки коротких зданий (X < BН, где X - длина сооружения, BН - длина базиса при нормальном случае съемки). Для съемки длинных зданий (X > BН) желательно применять конвергентную съемку, так как уменьшается число фотостанций. При использовании того же числа фотопластинок, что и при нормальном случае съемки, и увеличении числа снимков в 2 раза с каждой фотостанции при конвергентной съемке можно получить ту же точность и даже выше (особенно по оси Y). При f = 100 мм целесообразно применять нормальный случай съемки, обеспечивающий повышение точности по сравнению с конвергентным в 1,3 - 2 раза. Для съемок сооружений рекомендуется применять широкоугольные фотокамеры с f = 100 мм, особенно при работе в стесненных условиях. Применение узкоугольных камер с f = 200 мм и f = 300 мм может быть рекомендовано только при определении координат X и Z. Измерение снимков на стереокомпараторах6.6. Для стереоскопического измерения снимков их укладывают на кассеты: негативы - эмульсионным слоем вниз, диапозитивы - эмульсионным слоем вверх и соответственно левый снимок - на левую кассету, правый - на правую. Затем снимки ориентируют монокулярно независимо один от другого таким образом, чтобы линии, соединяющие оси X и Z, были параллельны соответствующим осям прибора. Наводят измерительную марку на верхнюю координатную метку и, не сбивая шкалу X, переводят марку на нижнюю координатную метку. Несовмещение марки с координатной меткой устраняют движением X и поворотом соответствующей кассеты на угол χ. Таким же образом ориентируют другой снимок. По окончании этих действий определяют места нулей шкал X, Z, P прибора. Места нулей шкал x и z определяют по левому снимку. Для определения места нуля шкалы X(MOX) левая измерительная марка наводится на нижнюю или верхнюю координатную метку оси и берется отсчет по шкале X стереокомпаратора. Для определения места нуля шкалы Z(MO) визируют на левую или правую координатную метку оси X и берут отсчет по шкале Z. Если съемка выполнялась со смещенным положением объектива, то место нуля изменяется на соответствующую величину. Для определения места нуля шкалы продольных параллаксов (MOp), не смещая левую марку с координатной метки Z левого снимка, движением винта продольных параллаксов совмещают правую измерительную марку с соответствующей координатной меткой правого снимка. Если для определения поправок за нарушение элементов ориентирования проектируют измерение поперечного параллакса q или координат zП, то определяют место нуля шкалы q(zП). Местом нуля шкалы q(MOq) будет такой отсчет по шкале q, при котором левая и правая измерительные марки будут наведены одновременно на координатные метки XX соответственно левого и правого снимков. С этой целью левую марку штурвалами X и Z наводят на координатную метку XX левого снимка, а правую координатную метку совмещают с координатной меткой XX правого снимка движениями винтов продольного и поперечного параллаксов. 6.7. Измерение снимков на стереокомпараторе выполняется стереоскопически. Для этого левую измерительную марку совмещают с точкой левого снимка штурвалами X и Z, а правую измерительную марку совмещают с идентичной точкой правого снимка движением винтов продольного и поперечного параллаксов. Целесообразно все отсчеты на точки выполнять не менее 2 раз во избежание ошибок наведения и просчетов, причем второй прием измерений следует делать после окончания первой программы наблюдений. Все измерения заносятся в журнал, образец которого представлен в табл. 29. Таблица 29
Журнал измерений снимков на стереокомпараторе Объект Стереокомпаратор № 1427 Стереопара А12-В14 B = 28,342 мм fK = 193,48 мм, MOX = 102,64 мм MOX = 78,32 мм MOp = 5,37 мм MOq = 7,24 мм Методика математической обработки снимков при различных случаях съемки6.8. Аналитическая обработка снимков в зависимости от вида съемки, количества контрольных точек, полноты измерения снимков, способа определения и введения поправок за изменение элементов внутреннего и внешнего ориентирования выполняется по различной методике. При нормальном случае съемки математическая обработка снимков несложна и может выполняться при помощи малых вычислительных средств (арифмометров, вычислительные полуавтоматов). При других случаях съемки целесообразно применять ЭВМС. Алгоритм и программу можно составить. Обработка снимков, полученных с базиса фотографирования, параллельного основной плоскости сооружения
где x"Л, z"Л, p", q" - средние значения отсчетов по шкалам стереокомпаратора. Пространственные фотограмметрические координаты контрольных точек вычисляют по формулам:
где XK, YK, ZK - координаты контрольных точек в пространственной фотограмметрической системе координат; XГК, YГК, ZГК - геодезические координаты контрольных точек; XSЛ, YSЛ, ZSЛ, XГSЛ, YГSЛ, ZГSЛ - соответственно координаты центра проекции левой фотостанции в фотограмметрической и геодезической системах координат. В формулах (153) принято, что ось YГ геодезической системы координат совмещена с направлением основной продольной оси сооружения, т.е. линия базиса параллельна оси YГ. Теоретические значения координат и продольного параллакса на снимках вычисляют по формулам:
При измерении поперечного параллакса q(zП) вычисляют также
где BZ - превышение правого центра проекции над левым, т.е. BZ = ZSП - ZSЛ. Вычисляют поправки ∆x, ∆z, ∆p для всех контрольных точек:
Если измеряли q(zП), то вычисляют также ∆zП = zП - z'П = zП - (z'Л - q'). 6.10. Составляют уравнения поправок для контрольных точек. Уравнения поправок можно составлять различные в зависимости от количества контрольных точек, определяемых координат точек сооружения и т.п. Решают систему уравнений поправок или систему нормальных уравнений и определяют неизвестные коэффициенты ai, ci. Вычисляют поправки ∆xЛ, ∆zЛ, ∆p (∆xП), ∆zП по тем же уравнениям поправок, которые использовали для определения коэффициентов ai, ci. В данном случае x и z будут координатами той определяемой точки, для которой вычисляют поправки. Вычисляют исправленные значения координат и продольных параллаксов определяемых точек:
Если вместо ∆p определяли поправки ∆xП, то
Если определяли поправки ∆zП, то вычисляют
6.11. Вычисляют пространственные фотограмметрические координаты X, Y, Z точек сооружения. Если определяли координаты zП, то вычисляют координату Z второй раз:
и за окончательное значение Z берут среднее, найденное по измерениям zЛ и zП. Если необходимо, то пространственные фотограмметрические координаты перевычисляют в геодезическую систему. В общем случае перевычисление выполняют по формулам: Если ось Y фотограмметрической системы параллельна оси XГ геодезической системы, то дирекционный угол оси Y фотограмметрической системы A = 0 и переход от фотограмметрической системы к геодезической будет выполняться по формулам:
Обработка снимков при нормальном случае съемки и базисе фотографирования, непараллельном основной плоскости сооружения6.12. Наиболее часто могут встречаться два случая: 1) когда координаты контрольных точек определяют с линии базиса и они вычислены в пространственной фотограмметрической системе координат, причем за ось X принимают обычно направление базиса, а за ось Y - перпендикуляр линии базиса (рис. 12,а); 2) когда координаты центров проекций определяют в системе координат сооружения, в которой ось Y направлена вдоль основной продольной оси сооружения (рис. 12,б). Поскольку координаты контрольных точек получены в пространственной фотограмметрической системе координат (первый случай), то аналитическую обработку снимков можно выполнить полностью (см. пп. 6.9 - 6.11) вплоть до вычисления пространственных фотограмметрических координат точек сооружения. После этого перевычисляют найденные координаты точек сооружения в систему координат осей сооружения, причем система координатных осей сооружения может быть выбрана левой (геодезическая система XГ, YГ, ZГ) или правой (фотограмметрическая система X, Y, Z).
Рис. 12. Пространственные системы координат при базисе съемки, непараллельном основной плоскости сооружения В любом случае для перевычисления необходимо определить угол поворота координатных осей по формуле
где X1, Y1, X2, Y2 - пространственные фотограмметрические координаты точек сооружения, лежащих в вертикальной плоскости, параллельной основной продольной оси сооружения. 6.13. Перевычисление в левую (геодезическую) систему координат выполняют по формулам:
где XГН YГН,ZГН - координаты точки сооружения, принятой за начало координат на сооружении. Перевычисление в правую (фотограмметрическую) систему координат производят по формулам:
где X', Y', Z' - координаты точек сооружения в системе координатных осей сооружения; X'Н, Y'Н, Z'Н - координаты начальной точки (начало координат) на сооружении. 6.14. Если координаты центров проекций и координаты контрольных точек даны в геодезической системе, вычисления выполняют обычно в одной из двух пространственных фотограмметрических систем координат, а именно когда ось X фотограмметрической системы координат совмещается с линией базиса, а ось Y - по направлению оптической оси фотокамеры (см. рис. 12,а), т.е. как в первом случае, и когда ось Y фотограмметрической системы координат принимается параллельной оси X геодезической системы координат (см. рис. 12,б). Когда за ось Y принято направление оптической оси фотокамеры, перевычисление геодезических координат в фотограмметрические выполняют по формулам:
Значение угла A0 - дирекционного угла оптической оси фотокамеры - определяется по формуле
В дальнейшем вычисления выполняют в таком же порядке, как и в первом случае (см. пп. 6.9 - 6.11). После вычисления пространственных координат их перевычисляют в геодезическую систему координат по формулам (160) или в систему координат сооружения по формулам (162) - (164). Если за ось Y пространственной фотограмметрической системы координат принимается направление, параллельное оси X геодезической системы координат, то геодезические координаты перевычисляют в фотограмметрические по формулам:
6.15. Теоретические значения координат и продольных параллаксов вычисляют по формулам:
6.16. Дальнейшее вычисление по определению исправленных значений координат и продольных параллаксов выполняют в порядке, приведенном в пп. 6.9 и 6.10. Пространственные фотограмметрические координаты определяемых точек вычисляют по формулам:
Аналитическая обработка снимков при общем случае съемки6.17. При общем случае съемки аналитическая обработка снимков может выполняться различными способами в зависимости от полноты измерений снимков, применяемого измерительного прибора (стереокомпаратора, монокомпаратора), количества контрольных точек, способа определения и введения поправок за нарушение элементов внутреннего и внешнего ориентирования. При общем случае съемки стереоэффект при рассматривании снимков может не возникать; в этом случае снимки измеряют монокулярно и для контрольных точек определяют значения координат xЛ и zЛ на левом снимке и координат xП и zП на правом снимке. Координаты для определяемых точек можно не измерять, однако для повышения точности определения координат Z точек сооружения значения zП следует измерять. Если по снимкам наблюдается стереоэффект и их измеряют на стереокомпараторах стереоскопически, то для контрольных точек следует измерять значения xЛ, zЛ, p, q. По значениям p и q вычисляют координаты xП и zП по формулам:
Поперечный параллакс для определяемых точек измеряют в случае, когда необходимо повысить точность определения координат Z. Порядок аналитической обработки снимков при общем случае съемки см. пп. 6.18 - 6.22. 6.18. Вычисляют углы поворота базиса. Если координаты центров проекций даны в геодезической системе координат, то угол поворота базиса A относительно оси YГ определяется в соответствии с формулой (166). Если координаты центров проекций даны в фотограмметрической системе, то угол поворота базиса A вычисляют относительно оси X по формуле
Геодезические координаты контрольных точек перевычисляют в базисную пространственную фотограмметрическую систему координат по формулам:
Если координаты контрольных точек даны в фотограмметрической системе координат X', Y', Z', то их перевычисляют в базисную фотограмметрическую систему координат X, Y, Z (за ось X принято направление базиса) по формулам:
6.19. Вычисляют теоретические значения координат (в данном случае соответствующие нормальному случаю съемки) контрольных точек на левом и правом снимках по формулам:
6.20. Составляют для контрольных точек уравнения поправок, а при наличии пяти контрольных точек и более - нормальные уравнения. Уравнения поправок и нормальные уравнения составляют независимо для левого и правого снимков. Решают независимо для левого и правого снимков уравнения поправок (или нормальные уравнения) и находят коэффициенты a'i и c'i для правого снимка. Вычисляют для определяемых точек поправки в измеренные значения координат на левом и правом снимках по формулам:
если они использовались для составления уравнений поправок, или по формулам:
В этих формулах коэффициенты a'i и c'i будут уже известны из решения систем уравнений поправок (или нормальных уравнений). В первом приближении значения xt и zt берут равными измеренным значениям, с которыми вычисляют исправленные значения координат определяемых точек на левом и правом снимках.
Во втором приближении поправки вычисляют по тем же формулам, но в качестве значений xt и zt берут найденные их значения из первой итерации. Используя вторичные поправки, находят исправленные значения координат (трансформированные значения) во второй итерации и т.д. Цикл итераций заканчивается, когда последующие значения трансформированных координат отличаются от предыдущих значений на допустимую величину ε, которую устанавливают обычно в пределах 0,001 - 0,002 мм. 6.21. Используя найденные трансформированные значения координат, вычисляют пространственные фотограмметрические координаты определяемых и контрольных точек (координаты контрольных точек вычисляют для контроля предыдущих вычислений) по формулам:
где pt = xЛt - xПt, a значения xЛt, zЛt, xПt, zПt берут из последнего приближения. 6.22. Если необходимо, то найденные пространственные фотограмметрические координаты в базисной системе перевычисляют в первоначальную систему координат или в систему координат сооружения. Перевычисления выполняют в геодезическую систему координат по формулам (160), в фотограмметрическую - по формулам:
где X, Y, Z - значения пространственных фотограмметрических координат в базисной системе. Фотограмметрические координаты в соответствии с методикой, приведенной в пп. 6.12 - 6.14, перевычисляют в систему координат сооружения. Алгоритмы и программы обработки снимков с известными и неизвестными элементами ориентирования (архивных снимков) приведены в прил. 3 и 4. 7. СЪЕМКА МОДЕЛЕЙ ПРИ ПРОЕКТИРОВАНИИ СООРУЖЕНИЙОсобенности съемки моделей7.1. При создании и испытании новых типов конструкций и сооружений широкое применение нашел метод испытания сооружений и отдельных конструкций на моделях, выполняемых в крупных масштабах порядка 1:5 натуральной величины. Применение фотограмметрических измерений для исследования моделей основывается на методах и приборах, используемых при съемке сооружений, и для топографических целей. Основной задачей исследования моделей является определение деформаций различных точек модели для каждого этапа загрузки модели. При действии динамических нагрузок можно определить частоту и форму колебаний, мгновенные формы линий и поверхности деформаций. Применение обычных механических средств для измерения деформации зачастую не обеспечивают требуемую точность определения параметров моделей. Кроме того, отсчеты по индикаторам не могут быть выполнены в один физический момент, что искажает результаты испытаний. При применении фотограмметрических методов исследований количество определяемых точек практически не ограничено, деформация модели может быть определена по любому направлению, тогда как каждый индикатор определяет деформацию только в одном направлении. Объекты съемки при применении фотограмметрии для испытания моделей обычно располагаются на сравнительно малых расстояниях. Поэтому возникает ряд специфических особенностей в отношении проведения таких съемок. 7.2. При выполнении съемки необходима установка оптической сопряженности между объектом и его изображением. Фототеодолиты, применяемые для топографических целей и съемки сооружений, имеют фотокамеры с постоянным фокусным расстоянием; плоскость прикладной рамки, в которой помещается кассета с фотопластинкой, расположена в фокальной плоскости объектива, что соответствует получению резкости изображения при съемке удаленных объектов. При съемке с малых расстояний для выполнения условия резкости изображения необходимо, как известно, при приближении к объекту съемки увеличить фокусное расстояние фотокамеры. Поэтому необходимо при съемке с малых расстояний использовать фотокамеры с переменным фокусным расстоянием. К таким фотокамерам для измерительных целей относятся различного рода стереофотограмметрические камеры. Некоторые из них, в частности SMK 5,5/0808, имеют постоянное фокусное расстояние, отъюстированное для получения резкого изображения в определенном диапазоне расстояний до объекта. Для съемок моделей с близкого расстояния можно использовать фотокамеры UMK 10/1318, UMK 10/1318, которые имеют выдвигающиеся объективы, что дает возможность выполнять съемку с близкого расстояния (1 - 2 м). При съемке с малых расстояний фототеодолитам с постоянным фокусным расстоянием камеры, отъюстированным на бесконечность, возникает нерезкость изображения. Поэтому необходимо рассчитать минимальное отстояние до объекта, при котором изображение его на снимке получается довольно резким. Отстояние определяется по формуле где δ - допустимая величина нерезкости; d/F - относительное отверстие объектива. Формула (180) показывает, что при съемке с малых расстояний резкость изображения можно повысить диафрагмированием. Величина допустимой нерезкости зависит от требуемой измерительной точности снимка. Однако если измерения снимков выполняют по маркированным точкам, то величина нерезкости сказывается в меньшей степени. Хотя края марки изображаются несколько нерезкими, визирование на центр марки выполняется уверенно. При измерении по маркированным точкам можно допустить нерезкость порядка 0,1 мм и, следовательно, снимать маркированные объекты с расстояний, примерно в 5 раз меньших, чем немаркированные. На основании формулы (180) составлена табл. 30 минимальных отстояний при съемках фототеодолитами, отфокусированными на бесконечность. Таблица 30 δ = 0,1 мм
7.3. Многие фототеодолиты, такие как С-3в, «Фотео-19/1318» и др. имеют постоянную диафрагму, равную 1/25. Поэтому при съемке этими фотокамерами (f = 200 мм) минимально допустимые расстояния не должны быть меньше 15 - 16 м. Однако модели часто необходимо (для повышения точности измерений) снимать с более близких расстояний, поэтому возникает необходимость увеличивать фокусное расстояние фотокамеры. Такое изменение фокусного расстояния в соответствии с основными уравнениями оптики определяется по формуле
где Y - отстояние до плоскости объектива, на которую производится наводка на резкость. Так, для съемки с расстояния 2 м фокусное расстояние фотокамеры «Фотео 19/1318» следует изменить на 20 мм, а при съемке с 1 м - на 50 мм. Изменение фокусного расстояния наиболее просто осуществить при помощи переходных колец. 7.4. Глубину резкости изображаемого пространства ∆Y можно вычислить по значению гиперфокального расстояния где Y0 - отстояние от плоскости наводки на резкость; D - гиперфокальное расстояние, определяемое формулой при заданном значении диаметра δ кружка нерезкости. Границы глубины резкости:
Отстояние до плоскости наводки на резкость в зависимости от границ глубины резкости
7.5. Расчеты, выполненные по формулам (182) - (185) для определения глубины и границ резкости, приведены в табл. 31. В числителях и знаменателях приведены соответственно ближние и дальние границы резкости. Числа слева показывают глубину резкости. При расчете данных табл. 31 принято значение относительного отверстия фотокамеры, равное d/F = 1/25. При уменьшении относительного отверстия диафрагмированием границы и глубина резкости соответственно увеличиваются. Таблица 31
7.6. При съемке фототеодолитами с близких расстояний почти во всех случаях необходимо учитывать внецентренность передней узловой точки объектива. Это связано с тем, что началом пространственных фотограмметрических координат является передняя узловая точка объектива фототеодолита, а при контрольных геодезических измерениях началом координат служит вертикальная ось вращения фототеодолита, поэтому координаты Y, определенные из геодезических измерений, отличаются от фотограмметрических на величину внецентренности. Внецентренность передней узловой точки объектива фототеодолита необходимо знать не только для определения геодезических пространственных координат точек объекта, но и для определения поправок за нарушение элементов внешнего ориентирования как по контрольным точкам, так и по контрольным направлениям. При мелкомасштабной фототеодолитной съемке внецентренностью объектива фототеодолита обычно пренебрегают. При крупномасштабной съемке необходимо определить внецентренностъ объектива с точностью 1 см, что легко выполнить простым измерением по фототеодолиту. При съемке с близких расстояний, например при съемках и определениях деформаций и моделей, когда требования к точности определения отстояний значительно повышаются, необходимо знать внецентренностъ передней узловой точки фототеодолита с точностью до 1 мм, а иногда и точнее. Внецентренность передней узловой точки S1 объектива можно определить непосредственными промерами по схеме, приведенной на рис. 13. Для этого следует установить в фокальной плоскости F1 матовое стекло (по изображению удаленной точки), измерить расстояние l между плоскостью прикладной рамки и вертикальной осью фототеодолита. Внецентренностъ e передней узловой точки в этом случае находят по формуле e = l - f - d. (186) Этот способ требует изготовления соответствующего приспособления. Простейшим приспособлением может служить окулярная часть зрительной трубы с внешней фокусировкой от кипрегеля или теодолита. 7.7. Если внецентренность достаточно знать с точностью 0,5 - 1 мм, то можно применить полевые способы, одним из которых может служить способ, основанный на сравнении углов, измеренных теодолитом и найденных фотограмметрически по измерениям точек, для которых определены горизонтальные углы теодолитом. Формулу для вычисления внецентренности можно получить на основании рис. 14, где G - точка стояния фототеодолита; S1 - положение передней узловой точки объектива фототеодолита; 1 - 6 - марки, установленные по створу симметрично относительно точки О. Практически наиболее просто створ создается натянутой проволокой, на которой укрепляются марки.
Рис. 13. Определение внецентренности передней узловой точки объектива фототеодолита
Рис. 14. Определение внецентренности передней узловой точки фототеодолита полевым способом Оптическую ось фототеодолита при помощи ориентирующего устройства устанавливают перпендикулярно линии створа путем наведения на точку О и производят фотографирование. Затем вместо фототеодолита устанавливают теодолит и измеряют горизонтальные углы βТ на марки створа. Эти же углы из фотограмметрических измерений определяют по формуле
где X - абсцисса марки на снимке, измеренная на стереокомпараторе. Учитывая, что разность углов ∆β = βФ - βТ мала, находим
Из формулы (188) отстояние, при котором необходимо выполнять съемку, равно:
При βCP = 20 получим YС = 11 мм. Таким образом, фотографирование следует выполнять с близкого расстояния. Возникающая при этом нерезкость сравнительно мало сказывается на точности измерения абсцисс при измерениях по маркированным точкам. Отстояние YС достаточно измерить с точностью порядка 2 - 3 см, поэтому перпендикулярность базиса оптической оси фототеодолита достаточно выдержать с точностью 15 мин. 7.8. При съемках с близких расстояний возникают трудности контроля по направлениям из-за внецентренности передней узловой точки объектива фототеодолита и необходимости вводить поправки в измеренные углы, что снижает точность работ. Кроме того, затруднено (при очень коротких расстояниях) и измерение углов теодолитом. Контроль элементов внешнего ориентирования выполняется обычно по контрольным линейным промерам, масштабным отрезкам на объекте съемки. Высоты точек определяют геометрическим нивелированием относительно координатных меток фототеодолита. 7.9. Переход от съемок одиночными камерами к съемке стереофотограмметрическими камерами вызывается малыми длинами базисов при съемке с малых расстояний. При использовании стереофотограмметрических камер можно из специальных исследований определить элементы взаимного ориентирования с высокой точностью, а их жёсткое крепление устраняет погрешность взаимного ориентирования и упрощает установку элементов внешнего ориентирования при съемке. При использовании одиночных камер возникают некоторые особенности, связанные с измерением коротких базисов, ориентированием камер и необходимостью повышения точности центрирования камер. 7.10. Требования к точности определения размеров и форм объектов фотографирования повышаются. Измерение моделей необходимо выполнять с точностью до десятых или сотых долей миллиметра, для чего в свою очередь требуется повысить точность измерений снимков, определения элементов внешнего и внутреннего ориентирования, контрольных измерений, а также повысить требования к плоскостности фотопластинок. При съемке местности обычно все эти требования несколько ниже, поскольку соответственно ниже требования к точности составления карт и планов. Все указанные особенности выполнения съемки с близких расстояний требуют тщательности исполнения всех операций, продуманной организации и технологии работ в целях наиболее полного исключения различного рода погрешностей, возникающих при фотограмметрических измерениях. Применяемые приборы7.11. Для съемки моделей сооружений применяют стереофотограмметрические камеры народного предприятия «Цейсс» (Йена) UMK 10/1318, UMK 10/1818, SMK 55/0808, которые отвечают основному требованию при съемке с близких расстояний - возможности изменения фокусного расстояния камеры. Фокусное расстояние камеры UMK f = 100 мм, формат фотопластинки - 18×18 см. Точное значение фокусного расстояния при наведении на бесконечность фиксируется на фотопластинке. Объектив при помощи выдвижного тубуса можно фокусировать точно для расстояний 3,6; 4,2; 5; 6; 8; 12; 25 м. Соответствующие значения приращения фокусного расстояния фиксируются на фотопластинке. Указанные ступени изменения фокусировки позволяют выполнить фотосъемку для расстояния от 2 м до бесконечности. Шкала фокусных расстояний может переключаться для значений фокусных расстояний, относящихся к съемке в инфракрасных лучах. Максимальное значение дисторсии объектива 0,0006 мм. Объектив снабжен центральным затвором с выдержками от 1 до 1400 с, возможна съемка с длительной выдержкой. Объектив имеет переменную диафрагму в пределах от 1:8 до 1:32. Возможна синхронизация работы затворов двух камер UMK. Фотокамера может устанавливаться в трех положениях: с горизонтальным положением оптической оси при расположении длинной стороны фотопластинки горизонтально; с горизонтальным положением оптической оси фотокамеры при расположении длинной стороны фотопластинки вертикально; с вертикальным положением оптической оси для съемки в зенит. Фотокамера UMK имеет в комплекте батарею напряжением 12 В, которая служит для питания индикаторных ламп и работы затвора. Затвор может также работать механически при помощи спускового тросика. Фотокамеру можно использовать и без подключения к батарее. При съемке можно маркировать номера снимков от 1 до 72 и вид съемки. 7.12. На базе фотокамеры UMK 10/1318 создана стереофотограмметрическая камера IMK 10/1318, специально предназначенная для съемок с близких расстояний. В новых модернизированных камерах UMK фокусировка осуществляется от 1,4 м до бесконечности. Диапазон наклонов камеры изменяется ступенями через 15° от -30 до +90°. Выпускается фотокамера, позволяющая выполнить съемку как на фотопластинки, так и на роликовую пленку шириной 19 см, что создает возможность применения цветной пленки. При использовании роликовой пленки можно выполнить съемку как отдельными кадрами, так и последовательную автоматическую кадровую съемку, что особенно важно при исследованиях движущихся объективов. Система синхронизации с точностью до 0,005 сможет управлять спуском затворов двух камер, что используется при стереосъемке движущихся объектов. Для одиночных камер UMK 10/1318 выпускаются подвески, позволяющие выполнять съемку вертикально вниз и использовать камеры других конструкций. Двойная подвеска (для установки двух камер UMK в целях получения стереофотограмметрической камеры при съемках с близкого расстояния) выпускается в облегченном варианте, что позволяет не только использовать стереокамеру в стационарных условиях, но и транспортировать ее к объекту. 7.13. Стереокамеры SMK-5,5/0808/40 и SMK-5,5/0808/120 имеют фокусные расстояния примерно 55 мм. Первая камера укреплена на базисе 40 см, вторая - 120 см. Электромеханические затворы работают синхронно от батареи 12 В. Камера SMK-5,5/0808/40 сфокусирована на расстояние 4 м и позволяет получать резкое изображение в диапазоне 1,5 - 10 м; камера SMK-5,5/0808/120 отфокусирована на расстояние 8 м и может применяться при съемках в диапазоне расстояний 5 - 30 м. Подвески позволяют выполнить съемку с наклонными осями в диапазоне от -90 до +90° со ступенями через 15°. Стереофотограмметрическая камера СКИ-3 (разработана И.Г. Индиченко) предназначена для фотографирования близких объектов. Наименьшее расстояние от объектива до объектов съемки 0,6 м. Передвигая камеры по направляющей, можно изменить базис фотографирования в пределах 140 - 1000 мм. Фотографирование производится на стеклянную фотопластинку размером 65×90 мм. Угол между оптическими осями камер устанавливается равным любому значению в пределах 0 - 20°. Методы съемки и камеральной обработки7.14. При исследовании моделей сооружений в лабораторных условиях возникает возможность значительного увеличения числа контрольных точек, которые можно укреплять на стенах, стенде, штативах или использовать отвесы с марками и контрольные линии. При исследовании таких моделей, как фермы, балки и т.д., которые имеют решетчатую конструкцию, контрольные марки можно расположить на стене заднего плана или на раме испытательного стенда так, чтобы они были вблизи определяемых. При съемке таких моделей и таком расположении контрольных и определяемых точек, когда последние расположены на снимке на расстоянии 2 - 5 мм от контрольных, создается возможность полностью не вводить поправки за нарушение элементов ориентирования и использовать для вычислений деформаций непосредственно измеренные на снимке смещения. 7.15. При съемках объемных сплошных моделей контрольные точки обычно располагают только вне модели, вблизи ее краев, вследствие чего центральные части модели становятся удаленными от контрольных марок и точность определения деформаций для них значительно снижается. Для создания сплошной сетки контрольных точек, обеспечивающей надежный контроль при съемке моделей любой формы, целесообразно использовать в качестве контрольных точек сетку натянутых на жесткую металлическую раму металлических проводов диаметром 1 - 2 мм, образующих квадраты; сетка проводов устанавливается перед исследуемой моделью. На снимках получается изображение модели с замаркированными определяемыми точками и сетки проводов со сторонами 10×10 мм в масштабе снимка. Все пересечения проводов (вершины квадратов) используют как контрольные неподвижные точки. Поправки за нарушение элементов ориентирования при наличии изображения контрольной сетки на снимке вводится из решения систем уравнений поправок, составленных по измеренным смещениям для ближайших вершин контрольной сетки. При использовании в качестве контрольных точек вершин сетки квадратов со стороной 1 см на снимке в значительной мере исключаются влияния неприжима и неплоскостности пластинки, поскольку определяемая точка находится не дальше 5 мм от одной из вершин. Использование контрольной сетки для исследования деформаций моделей позволяет применять фотокамеры с большим форматом кадра, что дает возможность уменьшить отстояния и увеличить масштаб изображения и тем самым повысить точность измерений. 7.16. При съемке необходимо следить за равномерной освещенностью модели. Освещенность модели и чувствительность фотопластинки следует подбирать таким образом, чтобы выдержка при съемке фототеодолитами без затворов (когда экспозиция осуществляется снятием крышки с объектива) не превышала 5 - 10 с. Съемку моделей следует выполнять не менее чем на 2 - 3 фотопластинки с каждой фотостанции (иногда число снимков может достигать 10 - 12), что необходимо не только для повышения точности работ, но и для получения надежного контроля, определяющего надежность и достоверность результатов измерений. Все расчеты допусков, предрасчет точности, выбор параметров съемки выполняются на основании формул и положений, приведенных в разд. 1 - 3. 7.17. Камеральная обработка снимков моделей может выполняться различными способами в зависимости от полноты измерений снимков, применяемого измерительного прибора, количества контрольных точек, способа определения и введения поправок за нарушение элементов внутреннего и внешнего ориентирования. Аналитическая обработка снимков с использованием стереокомпараторов и ЭВМ приведена в прил. 1 - 3. Для составления плана поверхности модели в изолиниях для всех деформационных ступеней нагрузки и получения координат определяемых точек можно использовать универсальный стереофотограмметрический прибор СПР-3М. Конструкция стереометра позволяет вести обработку стереопар наземной съемки и получать крупномасштабные планы поверхности малых объектов (моделей, конструкций). При обработке на СПР фототеодолитных снимков ориентирование их упрощается, так как известны элементы внешнего ориентирования при малых углах ∆ψ и ∆ω. Весь процесс обработки снимков заключается в выборе масштаба плана, базиса фокусного расстояния прибора, высоты сечения модели изолиниями. Масштаб плана определяется по формуле MПЛ = MСНn, (189) где MСН - масштаб снимка, n = 0,5, … 2 - пределы отношений MПЛ:MСН. Базис проектирования определяется из отношения
где bx величина базисного компонента по оси X прибора для горизонтального плана; tr - знаменатель горизонтального масштаба. Фокусное расстояние прибора
где tB - вертикальный масштаб стереомодели. Высота сечения модели определяется по формуле h = 2mr10 (192) где mr - средняя квадратическая ошибка составления плана (по паспорту прибора). Вследствие малости углов ∆ψ и ∆ω децентрацию снимков и коррекционных механизмов при ориентировании снимков по шести контрольным точкам можно не определять. 7.18. Средние квадратические погрешности пространственных координат определяются по формулам:
где σm - постоянная величина, которая для одиночной модели
mψ, mω - погрешности внешнего ориентирования стереомодели, полученные по формулам:
Определение натурных размеров сооружений по измерениям моделей7.19. Определение натурных размеров сооружений по измерениям моделей выполняют для таких проектируемых сооружений, формы которых не могут быть выражены математическими уравнениями, - скульптур, барельефов и т.д. Определение координат, профилей, разрезов выполняют по согласованию со скульпторами и архитекторами. Съемку моделей выполняют таким образом, чтобы получить все измерения в одной системе, удобной для последующего изготовления проектируемых сооружений и их отдельных конструкций и деталей. Объемные модели обычно снимают с четырех базисов, параллельных основным осям моделей, что облегчает дальнейшие измерения, математическую и графическую обработку. Базисные точки координируют в одной геодезической системе, в которой также определяют и все координаты опорных точек. При аналитической обработке снимков опорные точки для каждой стереопары следует представлять в базисной геодезической или фотограмметрической системе координат. 7.20. Профили сечений получают на универсальных приборах, имеющих соответствующие соединения осей координат прибора с осями координатографа. Наиболее удобно для построения сечений использовать универсальные стереоприборы типа технокарт, топокарт, стереометрограф, стереоавтограф 1318EL. Соединение отдельных сечений, полученных с разных базисов или в разных плоскостях, в одно общее производят не менее чем по трем общим опорным или определяемым точкам, если построение сечений выполняют на разных основах. Такими общими точками могут быть фиктивные точки, заданными координатами по шкалам прибора. Координаты точек сооружения вычисляют по координатам точек модели с учетом ее масштаба. Значения координат, полученных с разных базисов в различных базисных системах координат, перевычисляют в общую систему геодезических или фотограмметрических пространственных координат. Оформление чертежей выполняют с учетом требований проектировщиков сооружений и сопровождают каталогами координат всех опорных и определяемых характерных точек. Определение деформаций моделей для выдачи исходных параметров при проектировании сооружений7.21. Фотограмметрический метод измерения деформаций заключается в определении координат точек модели по измерениям снимков в момент нагрузки и сравнением их с натурными данными. В зависимости от поставленной задачи, условий, съемки, типа модели и т.д. можно применять фотограмметрический способ для определения деформации в одной плоскости (по двум координатным осям) и стереофотограмметрический способ для определения деформации по любому направлению. Фотограмметрическим способом определяют деформации только в плоскости XZ, т.е. в плоскости, параллельной плоскости прикладной рамки фотокамеры. Фотографирование модели производят с одной и той же неподвижной точки и получают несколько снимков исследуемой модели до деформации и после нее. Если вычислить координаты точек модели до деформации X, Z и после деформации X, Z, то можно определить величину перемещения точек модели:
где x, z и x', z' - координаты точек модели соответственно до и после деформации; ∆x и ∆z - смещения точек в плоскости снимка. Смещения ∆x и ∆z определяются как разности измеренных на снимках координат. Они могут быть измерены также на снимках непосредственно. В соответствии с этим фотограмметрический способ делится на два способа измерения снимков - по измерениям координат и по измерениям смещений. 7.22. При определении деформации по измерениям координат снимки измеряют монокулярно на стереокомпараторе. Перед измерением каждый снимок ориентируют по координатным меткам XX, ZZ и определяют места нулей шкал MOx, MOz. После этого визируют на определяемые и контрольные точки и берут отсчет x", z" по шкалам X, Z стереокомпаратора. Далее вычисляют измеренные значения координат:
где x', z' - средние отсчеты по шкалам стереокомпаратора. 7.23. Для непосредственного измерения смещений ∆x ∆z снимок, полученный до деформации (снимок нулевого цикла съемки), и снимок, полученный после деформации (снимок деформационного цикла), измеряют совместно. С этой целью на левую кассету стереокомпаратора устанавливают снимок нулевого цикла, а на правую кассету - снимок деформационного цикла. Каждый снимок ориентируют монокулярно. При этом наблюдается нулевой стереоэффект, поскольку снимки получены с одной фотостанции, но для точек, получивших смещение, наблюдается стереоэффект. Смещения ∆x и ∆z будут восприниматься и измеряться как разность продольных параллаксов ∆p и поперечный параллакс q. Для повышения точности измерения ∆z оба снимка можно повернуть в кассетах на 90°, вследствие этого смещения воспринимаются как ∆X и их можно измерить винтом продольного параллакса. При таком измерении смещений поправки за нарушение элементов ориентирования следует определять по формулам, у которых значения в уравнениях поправок для ∆x и ∆z независимы (различны). При измерениях смещений ∆x, ∆z в качестве начальных отсчетов p0, q0 берут отсчеты по шкалам продольного и поперечного параллаксов при визировании на неподвижную (контрольную) точку. Смещения ∆x, ∆z определяют как разность отсчетов на контрольную и определяемую точки:
и если смещения ∆z измеряют винтом продольных параллаксов ∆z' = -(p"z - pz) = -∆p'z, (199) где p", q" - отсчеты по шкалам винтов продольного и поперечного параллаксов при визировании на определяемую точку, ∆p', ∆z' (∆p'z) - измеренные значения смещений. В формулах (198) и (199) знак «минус» поставлен для учета противоположных направлений подписей шкал x, z и p, q. В измеренные значения смещений ∆x', ∆z' обычно для повышения точности вводятся поправки за изменение элементов внутреннего и внешнего ориентирования. Точность метода7.24. При исследовании моделей значительно повышаются требования к точности определения координат и деформации. Так, в ряде случаев возникает необходимость в измерениях модели с точностью до десятых, а иногда и до сотых долей миллиметра, для чего в свою очередь требуется повысить точность измерений снимков, определения поправок за нарушение элементов ориентирования, контрольных измерений, а также повысить требования к плоскостности фотопластинок. При определении деформации моделей значительно повышаются требования к стабильности центра проекции. Допустимые отклонения можно подсчитать по формулам:
где M - знаменатель масштаба изображения на снимке; (δXS)доп - допустимое искажение смещения, обусловленное влиянием сдвига ∆XS центра проекции. 7.25. При съемке моделей необходимо особенно тщательно следить за стабильностью положения фотокамеры. Нарушение стабильности по оси X может возникнуть за счет ошибок ориентирования фотокамеры по углу α, а по оси Z - за счет ошибок в горизонтировании фотокамеры по углу ω. Установка угловых элементов внешнего ориентирования сводится к установке прикладной рамки фотокамеры (плоскости фотопластинки) параллельно плоскости, в которой измеряют деформации точек ∆X, ∆Z. В отвесное положение фотокамера устанавливается по уровням. 7.26. При фотосъемке одной из важных задач является установка значений элементов внутреннего и внешнего ориентирования. Элементы внутреннего ориентирования устанавливают путем прижима фотопластинки к прикладной рамке фотокамеры. Требования к точности определения деформаций фотограмметрическим способом можно определить по формулам:
где m∆x, m∆z - погрешности измерения смещений на снимке. Требования к точности измерения отстояния устанавливаются исходя из необходимости получения максимальной точности и допустимых значений искажений на снимке:
7.27. При определении требований к допустимым погрешностям элементов ориентирования следует учитывать, что они имеют как систематические, так и случайные составляющие, поэтому необходимо установить соответствующие требования к этим источникам погрешностей. Требование к точности определения фокусного расстояния фотокамеры (систематическая погрешность) определяется по формуле
откуда При неприжиме фотопластинки или ее неплоскостности требования к изменению фокусного расстояния (случайная погрешность) определяются по формуле
откуда При f = 20 мм, ∆x = 0,5 мм, m∆x = 0,002 мм, Y = 50 м, x = 50 мм получим mf = 0,01 мм. 7.28. Средние квадратические погрешности определения деформаций при измерениях по способу координат определяются по формулам:
Формулы для предвычислений средних квадратических погрешностей определения деформаций по измерениям смещений имеют вид
В этих формулах принято m∆x = m∆z = mp, так как смещения ∆x, ∆z измеряют стереоскопически. 7.29. Точность измерения снимков при определении деформаций по способу смещений выше примерно в 1,5 раза по сравнению со способом координат. Это объясняется тем, что при способе смещения значения измеряют непосредственно, а при способе координат - как функции разности измеренных координат. Для повышения точности определения деформаций по оси Y (а она обычно ниже точности определения деформации по осям X, Z примерно в 4 раза) целесообразно при съемке (если это возможно по условиям работ) устанавливать оптическую ось фотокамеры перпендикулярно направлению деформаций точек модели. Для повышения точности различных измерительных задач на моделях в ряде случаев возникает необходимость в многократном фотографировании каждого цикла деформаций (по пять-десять снимков с каждой фотостанции на цикл), маркировании контрольных точек и расположении их вблизи определяемых точек для предотвращения погрешностей вследствие неприжима и неплоскостности фотопластинки, дисторсии объектива и ошибок элементов внешнего ориентировании. 8. ОФОРМЛЕНИЕ И КОНТРОЛЬ РАБОТВиды продукции и их оформление8.1. Составление отчетных документов является важным этапом завершения полевых и камеральных работ фототопографической съемки архитектурных памятников истории и культуры. При оформлении фотопланов фасадов и интерьеров архитектурных памятников способом фототрансформирования представляются: оригиналы планшетов фотопланов на жесткой основе с подклеенными на обратной стороне формулярами; схемы расположения опорных (корректурных) и контрольных точек; выкопировки сводок по рамкам с указанием расхождений между одноименными контурами; корректурные листы. При необходимости представления чертежных планов контуры фотоплана вычерчиваются тушью с последующим отбеливанием фотоизображения. 8.2. При выполнении архитектурных обмеров путем составления графических планов на универсальных приборах (методом стереорисовки) к сдаче представляются следующие материалы: оригиналы планшетов на жесткой или мягкой основе с формулярами, подклеенными к обратной стороне; схемы расположения фотостанций с показом их номеров, номеров снимков и данных об элементах ориентирования; каталоги координат опорных и определяемых точек; контактные отпечатки с нанесенными на них корректурными точками; журналы обработки снимков на универсальных приборах и стереокомпараторах; акты контроля выполненных работ. 8.3. При выполнении архитектурных обмеров аналитическим методом представляются к сдаче: графические планы, полученные путем вычисления и откладывания на планшете координат определяемых точек; схемы расположения станций фотографирования с данными об элементах внутреннего и внешнего ориентирования снимков; схемы расположения опорных и контрольных точек; каталоги координат опорных и контрольных точек, станций фотографирования и определяемых точек; фотоотпечатки снимков с наколотыми контрольными и определяемыми точками; увеличенные фотоотпечатки отдельных частей снимков с контрольными точками; акты контроля выполнения обмеров аналитическим методом. 8.4. При выполнении архитектурных обмеров аналитическим методом по архивным снимкам с неизвестными элементами внутреннего и внешнего ориентирования дополнительно представляются: результаты вычисления элементов ориентирования обрабатываемых снимков; результаты вычисления координат избыточных корректурных точек; результаты оценки точности получения координат одноименных точек по различным снимкам; пояснительная записка с анализом полученных результатов аналитической обработки архивных снимков. 8.5. На фотоплане должны быть нанесены и вычерчены тушью, согласно условным знакам, все опорные (корректурные) точки. Также вычерчивается рамка и выполняется зарамочное оформление фотоплана, включающее наименование объекта, масштаб фотоплана, условные знаки, дату изготовления и фамилии исполнителей. Корректурные листы выполняются на кальке или пластике с вычерчиванием на них пронумерованных мест и величин несовмещений контуров в десятых долях миллиметра. Схемы расположения опорных и контрольных точек выполняются на кальке с вычерчиванием опорных точек красной тушью кружком диаметром 5 мм и контрольных точек кружком того же диаметра синей тушью. Контроль работ8.6. Непосредственно при исполнении различных процессов необходимо проверить: правильность выписки исходных данных; надежность привязки съемочного обоснования к опорной геодезической сети; правильность выбора метода уравнивания съемочного обоснования; наличие контроля вычислений; составление и оформление каталогов координат; результаты оценки точности к их соответствие оговоренным в задании допускам; нанесение пунктов опорной геодезической сети и точек сгущения; корректирование снимков и камеральное сгущение съемочного обоснования; полноту, тщательность и аккуратность нанесения на планшеты контуров, надписей; полноту зарамочного оформления планшетов и наличие сводок по рамкам; выполнение замечаний предыдущего контроля. 8.7. Точность смонтированного фотоплана должна быть проверена по точкам, порезам и сводкам со смежными фотопланами. Контроль фотоплана по точкам заключается в определении величин несовмещения центров отверстий, пробитых пуансоном на отпечатках всех точек, по которым трансформировался фототеодолитный снимок, с одноименными точками на основе. Максимальное несовмещение контуров и точек не должно превышать 0,5 мм. Несовмещение контуров по порезам не должно быть больше 0,7 мм, а при коэффициентах трансформирования более 1,5х - до 1 мм. Контроль фотоплана по сводкам со смежными трапециями выполняется путем совмещения зарамочных отрезков трансформированных снимков с соседним фотопланом с ориентированием их по выходам координатной сетки. Допустимые несовмещения по сводкам 1 мм. При выполнении архитектурных обмеров путем составления графических планов на универсальных фотограмметрических приборах и аналитическим методом точность определения размеров отдельных элементов памятника устанавливается в соответствии с графической точностью нанесения контурных линий и принимается равной 0,4 - 0,5 мм в масштабе плана. Составление технической отчетности8.8. Технический отчет о работах по фототеодолитной съемке является составной частью отчета строительных, реставрационных работ, выполняемых на объектах. Технический отчет должен состоять из текстовой части и приложений. Текстовая часть содержит: 1) физико-географическую характеристику района работ; 2) топографо-геодезическую изученность; 3) существующие и вновь созданные опорные геодезические сети; 4) съемочное обоснование и фототопографическую съемку; 5) технический контроль и акты приемки работ; 6) перечень материалов, передаваемых заказчику и субподрядным организациям; 7) заключение. К техническому отчету прилагаются: копия технического задания; копия разрешения на производство работ; схема планово-высотной опорной геодезической сети; абрисы и чертежи попавших в зону работ центров и наружных знаков опорной геодезической сети; каталоги координат и высот пунктов опорной геодезической сети; общая схема фототеодолитных станций; каталог координат и высот точек постоянного съемочного обоснования и точек, закрепленных на долговременную сохранность; схема расположения фотопланов или архитектурных чертежей и границ снимаемого объекта; акт приемки материалов завершенных работ. 8.9. При изложении методики и порядка производства натурных (полевых) фототопографических работ на объекте необходимо указать: состав и объем выполненных работ, соответствие выполненных работ заданию и разрешению, количество фотостанций; длины базисов фотографирования и величины отстояний снимаемого объекта от станции стояния; обеспеченность стереопар необходимым количеством опорных точек, координаты и отметки которых определены геодезическим путем (чертежи, материалы контрольных точек, закрепленных на снимаемых участках, их увеличенные фотоотпечатки с полученных фотопластин; технология и производство фотолабораторных работ; оценка качества фотоматериалов, негативов; методика дешифрирования снимков и съемки «мертвых пространств»). 8.10. При изложении методики и порядка выполнения камеральных работ необходимо указать: применяемые приборы, методы сгущения съемочного обоснования, полученную точность точек сгущения; метод создания фронтальных планов, допустимые и фактические отстояния обработки стереопар; результаты контроля камеральных работ, соблюдение установленных допусков, общую оценку выполненных работ. При выполнении фототеодолитной съемки интерьеров и небольших частей экстерьера вместо технического отчета на каждую часть съемки составляется пояснительная записка, в которой необходимо указать краткий состав выполненных работ непосредственно при съемке и дальнейшей камеральной обработке полевых материалов. Приложение 1ОСНОВНЫЕ ТРЕБОВАНИЯ К ФОТОГРАММЕТРИЧЕСКИМ ПРИБОРАМ1. Инструментальная точность стереокомпараторов, полученная по измерениям контрольных сеток, должна удовлетворять требованиям, указанным в таблице.
2. Инструментальная точность универсальных приборов СД и СПР должна удовлетворять следующим допускам: относительная погрешность определения высот по измерениям контрольных сеток должна быть не ниже 1:10000; относительная погрешность высот, определяемая по плановым снимкам-макетам Ошуркова, для горной местности должна быть не более 1:5000; средняя погрешность плановых координат, выраженная в масштабе снимков-макетов, не должна превышать 0,05 мм, а максимальные погрешности ординат точек для СД - 0,15 мм, для СПР - 0,10 мм. Люфты в координатных и базисных каретках, коррекционных механизмах и механизмах децентраций не должны приводить к различиям отсчетов при прямом и обратном наведениях более 0,02 мм. Расхождения в показаниях счетчиков координат и различия в отсчетах при прямом и обратном наведениях вследствие люфта в ходовых гайках, ведущих винтах и счетчиках не должны превышать, мм: для движений X, Y - 0,05; для движения Z - 0,01. Инструментальная точность универсальных приборов, предназначенных для построения пространственных фотограмметрических сетей, определяемая построением по макетам ЦНИИГАиК сети протяженностью 8 базисов, должна удовлетворять следующим требованиям: По высоте: продольный наклон (м) ≤ 5 м; кручение ≤ 1 м; средняя квадратическая ошибка высот mh = ±0,75 м; предельная ошибка 2 м; относительная ошибка mh: H = 1:4000. В плане (в масштабе сети): масштабная ошибка ≤ 0,7 мм; сдвиги по оси X в середине сети ±0,14 мм; изгиб ±0,1 мм; средняя квадратическая ошибка mx = ±0,06 мм; средняя квадратическая ошибка my = ±0,06 мм; средняя квадратическая ошибка mS = ±0,09 мм. Средняя квадратическая погрешность элементов взаимного ориентирования m∆α = m∆ω = 0,7, а погрешности элементов внешнего ориентирования для конечных снимков сети (в масштабе модели 0,03 мм): mα = 2'; mω = 1',7; mχ = 2',5; mδ2(M) ≤ 0,5 mm. (в масштабе модели 0,03 мм): 3. Средняя квадратическая инструментальная погрешность стереоскопического отождествления и маркирования точек на ДСИ (определяемая по фотокопиям контрольных сеток) не должна превышать 10 мкм. Узел маркировки должен обеспечивать: постоянство формы, размеров и качества маркировочных знаков; сохранение юстировки в течение не менее 1 мес двухсменной работы на приборе; возможность маркировки на диапозитивах не менее 5000 точек без замены маркирующего элемента. 4. У фоторедукторов ПРС и Попова плоскости экрана и кассеты должны быть параллельны, погрешность в горизонтальности плоскостей не должна превышать 1'. Поверхности экрана и кассеты должны быть плоскими, прогиб экрана не должен превосходить 0,3 мм. Изображение должно быть резким при всех коэффициентах увеличения. Изображение должно быть подобным оригиналу при всех изменениях масштаба. Искажения изображения на краях не должны превосходить 0,3 мм при отношениях R = MCH:MК ≤ 3x и протяжении сети на основе до 90 см для фоторедукторов ПРС или при R ≤ 2х и протяжении сетей на основе до 60 см для фоторедукторов Попова. 5. У фототрансформаторов и ортофототрансформаторов ОФПД общая ошибка за влияние дисторсии и неровность экрана, определяемая путем проектирования и измерения контрольной решетки, не должна превышать 0,2 мм. Точность построения и измерения модели на ОФПД, определенная путем обработки макетов Ошуркова (плановые снимки горной местности), должна характеризоваться относительной ошибкой δh:H не более 1:3000: Приложение 2МЕТОДЫ ФОТООБРАБОТКИ И ФОТОМАТЕРИАЛЫВ процессе фотолабораторных работ составляются проявляющие и фиксирующие фоторастворы для негативов и фотобумаг, выполняются фотохимическая обработка негативов, изготовление контактных отпечатков, увеличенных (трансформированных) снимков, фотопанорам. На фотограмметрическое качество негатива влияют оползание эмульсии или ее деформация, подтеки, пятна, царапины, трещины, отпечатки пальцев и пр., неплотное прилегание фотопластины к плоскости прикладной рамки в момент фотографирования - неприжима. Неприжим контролируется путем сравнения получения негативов с негативом-эталоном, расстояния между координатными метками которого соответствуют расстояниям координатных меток фотокамеры, или измерением негативов на стереокомпараторе и последующим сравнением их с паспортными данными камеры. При отсутствии стереокомпаратора можно пользоваться эталонным негативом, накладывая его на исследуемый негатив так, чтобы совпали их координатные метки. Несовмещение меток не должно превышать 0,2 мм. Снимки с большим расхождением бракуются и переснимаются (см. таблицу). При выполнении фотосъемочных работ применяются следующие фотоматериалы: специальные фототеодолитные пластинки, выпускаемые под индексом «Фотопластинки для промышленных и научных целей», контрастные и полутоновые; чувствительность пластинок для съемок фасадов и их фрагментов при дневном свете должна быть порядка 1 - 8 ед. ГОСТ 10691.1-73. При съемке интерьеров и затемненных фасадов применяются высокочувствительные фотопластинки 32 - 180 ед. ГОСТа. Фотопластинки должны иметь разрешающую способность не менее 100 линий на 1 мм, противоореольный слой, большую фотографическую широту и вуаль не более 0,1.
Эмульсия не должна пузыриться и сползать при температуре растворов +35 °С и должна допускать промывку в проточной воде до 30 мин. Пластинки должны быть плоскопараллельными, для чего необходимо делать выборочный контроль пластин; фототехническая пленка (ФТ-П) светочувствительностью 16 - 32 ед., с фотографической широтой не менее 1:32, разрешающая способность - не менее 100 линий на 1 мм. Плотность вуали - не выше 0,1. Предназначена для съемки тоновых одноцветных и многоцветных объектов; фототехническая пленка (Ф-22) светочувствительностью 8 - 16 ед., фотографическая широта - около 1:8, разрешающая способность не менее 100. Плотность вуали не выше 0,12. Предназначена для съемки многоцветных объектов с очень низким контрастом - выцветших картин и т.д.; фотопленка малой светочувствительности (Ф-32): 28 - 53 ед. для дневного света, 20 - 40 ед. для электрических ламп накаливания. Фотографическая широта не менее 1:32, разрешающая способность - не менее 116 лин/мм, плотность вуали не более 0,05; фотографическая бумага различных размеров, глянцевая и матовая контрастная, особоконтрастная, нормальная, номера которой определяются при печати и зависят от контрастности объекта, применяемых негативов и их качества. Все фотоматериалы рекомендуется хранить в вертикальном положении эмульсионного слоя, чтобы избежать давления на эмульсионную поверхность, которое вызывает фрикционную вуаль. Коробки с форматной фотопленкой, фотобумагой, фотопластинками укладываются на ребро. В помещении, где хранятся фотоматериалы, должны отсутствовать пары аммиака, сероводорода и прочих активных газов с резким запахом. Условием хорошей сохранности фотоматериалов без ухудшения их фотографических свойств являются низкая температура и небольшая влажность воздуха. Приложение 3АЛГОРИТМ И ПРОГРАММА ОБРАБОТКИ ФОТОТЕОДОЛИТНЫХ СНИМКОВ С ИЗВЕСТНЫМИ КООРДИНАТАМИ ЦЕНТРОВ ПРОЕКЦИЙ СНИМКОВ (FOTO-1)Введение к алгоритму и программе Назначение 1. Программа предназначена для определения координат точек местности, сооружений, архитектурно-исторических памятников и других объектов по измерениям фототеодолитных снимков, полученных при любых видах съемки. Программа составлена на алгоритмическом языке PL/1 и предусматривает использование ЭВМ серии ЕС под управлением DOC, EC, V.M. 2.1 с оперативной памятью не менее 128 кб. Алгоритм программы Введение 2. При общем случае съемки при наблюдениях снимков стереоэффект может не возникать, поэтому за основу измерений в алгоритме принято монокулярное измерение снимков, когда измеряются независимо координаты XЛ, ZЛ и XП, ZП. Остальные системы измерений приводятся к измерениям XЛ, ZЛ, XП, ZП, и дальнейшие вычисления выполняются по одной общей схеме. Алгоритм предусматривает возможность использования до 20 контрольных и 200 определяемых точек. Предусмотрена также совместная обработка до 12 стереопар одного объекта, что позволяет повысить точность определения координат объекта. Алгоритм обладает универсальностью и позволяет обрабатывать снимки любого случая съемки. Предусмотрена также возможность вычисления разностей координат и расстояний между точками, номера которых устанавливаются в исходных данных. В зависимости от заданной точности и количества контрольных точек можно варьировать уравнения поправок за нарушение элементов ориентирования. Система пространственных координат точек объекта и центров проекций может быть любой. Тип измерительного прибора, система координат, выбор уравнения поправок задаются кодовыми числами. Элементы внутреннего ориентирования X0, Z0 не используются, фокусное расстояние может быть известно приближенно, снимки стереопар могут быть получены фотокамерами с разными фокусными расстояниями. Число контрольных точек должно быть не меньше четырех. Если координаты центров проекций определены с недостаточной точностью и при большой глубине объекта, следует использовать уравнения поправок, при которых число контрольных точек не должно быть меньше 6 - 7, причем они не должны лежать в одной плоскости, а располагаться на разных отстояниях. Исходными данными для расчета являются: места нулевой шкалы стереокомпаратора; координаты центров проекции левого и правого снимков; геодезические и фотограмметрические координаты контрольных точек; отсчеты по шкалам стереокомпаратора для контрольных и определяемых точек. В результате расчета получаем: пространственные фотограмметрические координаты контрольных и определяемых точек; геодезические координаты определяемых точек; расстояние и разности координат для точек сооружения. Порядок вычислений 3. Вычисление угла поворота базиса относительно оси YГ, если координаты центров проекции даны в геодезической системе координат (K = 0), или относительно оси XГ, если координаты центров проекций даны в фотограмметрической системе координат (K = 1): K = 0
K = 1
4. Вычисление базиса фотографирования:
5. Перевычисление геодезических координат контрольных точек в фотограмметрические (относительно центра проекции левого снимка): K = 0 Xi = (YГi - YГSЛ)cosA - (XГi - XГSЛ)sinA; Yi = (YГi - YГSЛ)sinA - (XГi - XГSЛ)cosA; ZЛi = ZГi - ZГSЛ; ZПi = ZГi - ZГSЛ = ZЛi - BZ; K = 1 Xi = (XГi - XГSЛ)cosA - (YГi - YГSЛ)sinA; Yi = (YГi - YГSЛ)cosA - (XГi - XГSЛ)sinA; ZЛi = ZГi - ZГSЛ; ZПi = ZГi - ZГSП = ZЛi - BZ. 6. Вычисление теоретических значений координат контрольных точек: на левом снимке:
на правом снимке:
7. Вычисление измеренных значений координат для контрольных и определяемых точек: N = 1 для левого снимка: X'Лi = X"Лi - MOXЛ; Z'Лi = Z"Лi - MOZЛ; для правого снимка: X'Пi = X'Лi - pi" + MOp; Z'Пi = Z'Лi - qi" + MOq; N = 2 для левого снимка: X'Лi = X"Лi - MOXЛ; Z'Лi = Z"Л - MOZП + q - MOq; для правого снимка: X'Пi = X'Лi - pi" + MOp; Z'Пi = Z"Пi - MOZП; N = 3 для левого снимка: X'Лi = X"Лi - MOXЛ; Z'Лi = Z"Лi - MOZЛ; для правого снимка: X'Пi = X"Пi - MOXП; Z'Пi = Z"Пi - MOZП, где X'Лi, Z'Лi - измеренные значения координат на левом снимке; X'Пi, Z'Пi - измеренные значения координат на правом снимке; X"Лi, Z"Лi, Pi, qi - измерения на стереокомпараторе для контрольных и определяемых точек; MOXЛ, MOZЛ, MOXП, MOZП - места нулей шкал стереокомпаратора. 8. Составление уравнений поправок для каждой контрольной точки: V = 1 (при i ≥ 4) для левого снимка: а0 + а1X0ЛiX'Лi + а2X0ЛiZ'Лi + a3X'Лi + a4Z'Лi = X0Лi - X'Лi; c0 + а1Z0ЛiX'Пi + а2Z0ЛiZ'Лi + c3Z'Лi + c4X'Лi = Z0Лi - Z'Лi, где i = 1, 2, 3, …, n = 20. Количество уравнений равно 2i, где i - число контрольных точек: для правого снимка: а'0 + а'1X0ПiX'Пi + а'2X0ПiZ'Пi + a'3X'Пi + a'4Z'Пi = X0Пi - X'Пi; c'0 + а'1Z0ПiX'Пi + а'2Z0ПiZ'Пi + c'3Z'Пi + c'4X'Пi = Z0Пi - Z'Пi V = 2 (при i ≥ 5) для левого снимка: а0 + а1X0ЛiX'Лi + а2X0ЛiZ'Лi + a3X'Лi + a4iZ'Лi = X0Лi - X'Лi; c0 + c1Z0ЛiX'Лi + c2Z2ЛiZ'Лi + c3Z'Лi + c4X'Лi = Z0Лi - Z'Лi, для правого снимка: а'0 + а'1X0ПiX'Пi + а'2X0ПiZ'Пi + a'3X'Пi + a'4Z'Пi = X0Пi - X'Пi; c'0 + c'1X0ПiX'Пi + c'2Z0ПiZ'Пi + c'3Z'Пi + c'4X'П = Z0Пi - Z'Пi; V = 3 (при i ≥ 6) для левого снимка: а0 + а1X0ЛiX'Лi + а2X0ЛiZ'Лi + a3X'Лi + a4Z'Лi + a5X0Лi2X'Лi = X0Лi - X'Лi; c0 + c1Z0ЛiX'Лi + c2Z0ЛiZ'Лi + c3Z'Лi + c4X'Лi + c5Z0Лi2Z'Лi = Z0Лi - Z'Лi; для правого снимка: а'0 + а'1X0ПiX'Пi + а'2X0ПiZ'Пi + a'3X'Пi + a'4Z'Пi + a'5X0Пi2X'Пi = X0Лi - X'Лi; c0 + c1Z0ЛiX'Лi + c2Z0ЛiZ'Лi + c3Z'Лi + c4X'Лi + c5Z0Лi2Z'Лi = Z0Лi - Z'Лi; V = 4 (при i ≥ 7) для левого снимка: а0 + а1X0ЛiXЛi + а2X0ЛiZ'Лi + a3X'Лi + a4Z'Лi + a5X0Лi2X'Лi + a6X0Лi2Z'Лi = X0Лi - X'Лi; c0 + c1Z0ЛiX'Лi + c2Z0ЛiZ'Лi + c3Z'Лi + c4X'Лi + c5Z0Лi2Z'Лi + c6Z0Лi2X'Лi = Z0Лi - Z'Лi; для правого снимка: а'0 + а'1X0ПiX'Пi + а'2X0ПiZ'Пi + a'3X'Пi + a'4Z'Пi + a'5X0Пi2X'Пi + a'6X0Пi2Z'Пi = X0Пi - X'П; c'0 + c'1Z0ПiX'Пi + c'2Z0ПiZ'Пi + c'3Z'Пi + c'4X'Пi + c'5Z0Пi2Z'Пi + c'6Z0Пi2X'Пi = X0Пi - X'Пi; V = 5 (при i ≥ 6, большей глубине и малой точности координат центров проекций) для левого снимка: а0 + а1X0ЛiXЛi + а2X0ЛiZ'Лi + a3X'Лi + a4Z'Лi + a5X0Лp + a6p = X0Лi - X'Лi; c0 + a1Z0ЛiX'Лi + a2Z0ЛiZ'Лi + c3Z'Лi + c4X'Лi + c5Z0Лip + c6p = Z0Пi - Z'Пi; для правого снимка: а'0 + а'1X0ПiX'Пi + а'2X0ПiZ'Пi + a'3X'Пi + a'4Z'Пi + a'5X0Пip + a'6p = X0Пi - X'Пi; c'0 + a'1Z0ПiX'П + a'2Z0ПiZ'Пi + c'3Z'Пi + c'4X'Пi + c'5X0Пip + c'6p = Z0Пi - Z'Пi; V = 6 (при i ≥ 7) для левого снимка: а0 + а1X0ЛiX'Лi + а2X0iZ'Лi + a3X'Лi + a4Z'Лi + a5X0Лip + a6p = X0Лi - X'Лi; c0 + c1Z0ЛiX'Лi + c2Z0ЛiZ'Лi + c3Z'Лi + c4X'Лi + c5Z0Лip + c6p = Z0Лi - Z'Лi; для правого снимка: а'0 + а'1X0ПiX'Пi + а'2X0ПiZ'Пi + a'3X'Пi + a'4Z'Пi + a'5X0Пip + a'6p = X0Пi - X'Пi; c0 + с'1Z0ПiX'Пi + c'2Z0ПiZ'Пi + c'3Z'Пi + c'4X'Пi + c'5Z'Пip + c'6p = Z0Пi - Z'Пi. В составленных уравнениях поправок коэффициенты ai, ci и a'i, c'i - неизвестные, подлежащие определению из независимого решения соответственно уравнения для левого и правого снимков. Для решения уравнений поправок они преобразуются в нормальные уравнения. 9. Составление нормальных уравнений в векторной форме: для левого снимка: XTЛXЛ = XTЛLЛ; для правого снимка: XTПXП = XTПLП, где XЛ - матрица, которая составляется из коэффициентов при неизвестных для левого снимка; XTЛ - транспонированная матрица; L - матрица-столбец, составленная из свободных членов уравнений поправок; XП, XTП, LП - соответственно те же матрицы, но составленные по уравнениям поправок для правого снимка. 10. Независимое решение нормальных уравнений и определение коэффициентов: для левого снимка ai, ci; для правого снимка a'i, c'i. 11. Вычисление поправок в измеренные значения координат контрольных и определяемых точек независимо для левого и правого снимков: V = 1 для левого снимка: ∆XЛi = a0 + a1X0ЛiX'Лi + a2X0ЛiZ'Лi + a3X'Лi + a4Z'Лi; ∆Z'Лi = c0 + a1Z0ЛiX'Лi + a2Z0ЛiZ'Лi + c3Z'Лi + c4X'Лi; для правого снимка: ∆X'Пi = a'0 + a'1X0ПiX'Пi + a'2X0ПiZ'Пi + a'3X'Пi + a'4Z'Пi; ∆Z'Пi = c'0 + a'1Z0ПiX'Пi + a'2Z0ПiZ'Пi + c'3Z'Пi + c'4X'Пi. Аналогично берутся для вариантов V = 2, 3, 4, 5, 6, соответствующие уравнениям из п. 7. Значения X0Лi, Z0Лi, X0Пi, Z0Пi для определяемых точек в первом приближении берутся равными измеренным значениям X'Лi, Z'Лi, X'Пi, Z'Пi. 12. Вычисление направленных в первом приближении трансформированных значений координат: на левом снимке: X'Лti = X'Лi + ∆X'Лi; Z'Лti = Z'Лi + ∆Z'Лi; на правом снимке: X'Пti = X'Пi + ∆X'Пi; Z'Пti = Z'Пi + ∆Z'Пi. V = 1 для левого снимка: ∆X"Лi = a0 + a1X'ЛtiX'Лi + a2X'ЛtiZ'Лi + a3X'Лi + a4Z'Лi; ∆Z"Лi = c0 + a1Z'ЛtiX'Лi + a2Z'ЛtiZ'Лi + c3Z'Лi + c4XЛi; для правого снимка: ∆X"Пi = a'0 + a'1X'ПtiX'Пi + a'2X'ПtiZ'Пi + a'3X'Пi + a'4ZПi; ∆Z"Пi = c'0 + a'1Z'ПtiX'Пi + a'2Z'ПtiZ'Пi + c'3Z'Пi + c'4X'Пi; V = 2 … 6 - вычисление выполняются по формулам п. 8. 14. Вычисление исправленных во втором приближении трансформированных значений координат: на левом снимке: X"Лti = X'Лi + ∆X"Лi; Z'Лti = Z'Лi + ∆Z"Лi; на правом снимке: X"Пti = X'Пi + ∆X'Пi; Z"Пti = Z'Пi + ∆Z'Пi. 15. По новым трансформированным значениям координат X"Лt, Z"Лt, X"Пt, Z"Пt вычисляются новые значения поправок (см. п. 13) и т.д. Цикл итераций заканчивается, когда последующие значения трансформированных координат на левом и правом снимках отличаются от предыдущих на величину, не превышающую: Xγti - Xγ-1ti ≤ 0,001 м; Zγti - Zγ-1ti ≤ 0,001 м, где γ = 1, 2, 3,..., n - количество приближений. 16. Вычисление пространственных фотограмметрических координат контрольных и определяемых точек: pti = XЛti - XПti;
K = 0 XГi = XГSЛ + YicosA - XisinA; YГi = YГSЛ + YisinA + XicosA; ZГi = ZГSЛ + Z; K = 1 XГi = XГSЛ + YisinA + XicosA; YГi = YГSЛ + YicosA - XisinA; ZГi = ZГSЛ + Z. Если обрабатывается одна пара снимков, то после п. 17 следует п. 24. 18. Если объект снимался на несколько фотопластинок, то последующие пары снимков обрабатываются аналогично тому, как описано в пп. 3 - 17. 19. Вычисление средних значений координат контрольных и определяемых точек, найденных в п. 18 для всех пар снимков:
где n - количество пар снимков n = 2, 3, …, 12. 20. Вычисление отклонений каждого значения координат для всех контрольных и определяемых точек от своего среднего значения: δXij = (XГi)j - (XГi)ср; δYij = (YГi)j - (YГi)ср; δZij = (ZГi)j - (ZГi)ср; где j - количество пар снимков j = 2, 3, …, 12.
22. Выявление грубых ошибок для каждой точки Если (δX, Y, Z)i > 3mX,Y,Z то соответствующие измерения X, Y, Z для данной точки исключаются и повторяются вычисления по пп. 19 - 21. Если (δX, Y, Z)i < 3mX,Y,Z, то ставится условие: если δX, Y, Z > 2mX,Y,Z, то соответствующее значение X, Y, Z для определяемых точек исключается и вычисления повторяются по пп. 19 - 21. Если (δX, Y, Z)i < 2mX,Y,Z, то вычисления продолжаются по пп. 19 - 21. 23. Вычисление средней квадратической погрешности определения среднего арифметического значения координат по всем снимкам отдельно для каждой контрольной и определяемой точки по формулам:
где i - количество значений X, Y, Z, использованных для вычисления среднего арифметического значения в п. 19. 24. Вычисление расстояний и разностей координат для точек сооружения: разность абсцисс точек ∆Xi-j = (XГi)ср - (XГj)ср; разность ординат точек ∆Yi-j = (YГi)ср - (YГj)ср; разность аппликат точек ∆Zi-j = (ZГi)ср - (ZГj)ср; пространственные расстояния между точками
где i, j - номера точек, которые задаются в исходных данных. Значения (XГi,j)ср, (YГi,j)ср, (ZГi,j)ср берутся из п. 19 при обработке двух и более пар снимков, и из п. 17, если обрабатывалась одна пара снимков. Алгоритм расчета 25. Программа FOTO состоит из внешней процедуры WCH и четырех внутренних процедур: MET3 - процедура вычисления поправок в измеренные значения координат контрольных и определяемых точек независимо для левого и правого снимков; PR 2 - процедура организации печати; SIST - процедура решения системы нормальных уравнений; PR 1 - процедура печати каталога геодезических координат контрольных и определяемых точек. Во внешней процедуре организованы ввод-вывод исходной информации, вычисление угла поворота базиса, перевычисление геодезических координат контрольных точек в фотограмметрические, вычисление теоретических значений координат контрольных точек, вычисление измеренных значений контрольных и определяемых точек, составление уравнений поправок для контрольных точек, вычисление пространственных фотограмметрических координат контрольных и определяемых точек, вычисление геодезических координат контрольных и определяемых координат, оценка точности и вычисление расстояний и разностей координат для точек сооружения. Состав и формы представления входной информации 26. Входная информация готовится на перфокартах со специальных карт ввода для исходных данных (см. п. 37). Лист 1 карты ввода 1. Информационная перфокарта содержит: наименование объекта по формату A30; здание по формату А8; стереокомпаратор по формату А30; количество пар снимков по формату I3. 2. Вторая перфокарта содержит: Кодовые числа: N - по формату I1. N = 1, если на снимках измерялись XЛ, ZЛ, p, q; N = 2, если на снимках измерялись XЛ, ZЛ, p, q; N = 3, если на снимках измерялись XЛ, ZЛ, XП, ZП K - по формату I1. K = 0, если координаты контрольных точек и центров проекций даны в геодезической системе координат; K = 1, если координаты контрольных точек и центров проекций даны в фотограмметрической системе координат: количество контрольных точек по формату I2; количество определяемых точек по формату I3; номер стереопары по формату А10; вариант аналитической обработки, по одному из форматов: V = 1, когда число контрольных точек i ≥ 4; V = 2, когда число контрольных точек i ≥ 5; V = 3, когда число контрольных точек i ≥ 6; V = 4, когда число контрольных точек i > 7; V = 5, когда число контрольных точек i > 6; большая глубина и малая точность координат центров проекций; V = 6, когда число контрольных точек i ≥ 7, большая глубина и малая точность координат центров проекций. 27. Условные обозначения и идентификаторы
3. Третья перфокарта содержит: фокусное расстояние аппарата по формату F8; места нулей шкал стереокомпаратора по формату 4F8. 4. Четвертая перфокарта содержит координаты центров проекции левого и правого снимков, по формату 6F10. 5. Пятая перфокарта + (n - 1) содержит: номер контрольной точки по формату А9; геодезические или фотограмметрические координаты контрольных точек (X, Y, Z) по формату 3F9. Таких перфокарт будет столько, сколько контрольных точек. На одной перфокарте содержатся: номер контрольной или определяемой точки по формату A8; отсчеты по шкалам стереокомпаратора (XЛ, ZЛ, p, q или XЛ, ZЛ, XП, ZП) по формату 4F8. Сначала записываются измерения для контрольных точек, потом - для определяемых. Таких перфокарт будет столько, сколько в сумме контрольных и определяемых точек. На листе 3 карты ввода записываются номера точек, между которыми должны быть определены расстояния. Номера точек записываются только в таком виде, как они записываются на листе 2 карты ввода (номера точек, название). Первой записывается номер точки (i), от которой определяется расстояние, по формату A8; на той же строке записываются номера точек (j), до которых определяются расстояния, по формату А8. Если этих точек больше 9, запись их номеров продолжается на другой строке. После окончания записи всех номеров (j) записать ********. Информация для (i + 1)-й точки записывается с новой строки. Признаком окончания исходной информации по листу 3 карты ввода служит пустая перфокарта. Перфокарта 1 листа 1 заполняется один раз. Если измерялась не одна пара снимков, дальше идут исходные данные для одной стереопары, потом для другой и т.д. Колода перфокарт для счета складывается следующим образом: а) перфокарта 1, листа 1 карты ввода; б) перфокарты 2, 3, 4, перфокарты с геодезическими или фотограмметрическими координатами контрольных точек для первой пары снимков; в) перфокарты с измерениями на стереокомпараторе для первой пары снимков (лист 2). Если измерялись несколько пар снимков, повторяются пункты «б» и «в» для всех пар снимков; г) перфокарты с номерами точек для определения расстояний. В конце колоды перфокарт положить пустую перфокарту. Если расстояния между точками не нужно определять, положить пустую перфокарту. 30. Состав и формы представления выходной информации. Для контроля исходной информации, вводимой с перфокарт, производится вывод ее на АЦПУ, при этом распечатываются (см. п. 38): наименование объекта; задание; марка и номер стереокомпаратора; количество обрабатываемых пар снимков; фокусное расстояние аппарата; номер стереопары; кодовые числа N и K; количество контрольных точек; количество определяемых точек; вариант аналитической обработки; места нулей шкал стереокомпаратора; координаты центров проекции в геодезической или фотограмметрической системе координат; геодезические или фотограмметрические координаты контрольных точек; отсчеты по шкалам стереокомпаратора XЛ, ZЛ, p, q или XЛ, ZЛ, XП, ZП. 31. Результаты расчета содержат три таблицы: 1) пространственные фотограмметрические координаты; 2) каталог геодезических координат; 3) расстояния и разносы координат для точек. 32. Состав пакета заданий для трансляции, редактирования и выполнения программы: || IOB FOTO; || OPTION LINK || UP SI ф1 || EXEC PL/1; <исходный модуль на языке PL/1 >; ||* || EXEC LNKEDT; || EXEC; исходные данные для расчета >; ||* || &. 33. Состав пакета задания для каталогизации программы в БАМ: || IOB FOTO; || OPTION CATAL; PHASE FOTO*; || EXEC PL/1; < исходный модуль на языке PL/1 >; |*; || EXEC LNKEDT; |* | &. 34. Состав пакета задания для выполнения программы, закаталогизированной в БАМ: || IOB FOTO; || EXEC FOTO; < исходные данные для расчета >, |*; | &. 35. Памятка и инструкция оператору для работы на ЭВМ К сведению оператора: В памяти машины программа FOTO занимает около 46 кб. Для работы с программой необходимы системные устройства: системное печатающее устройство, устройство ввода с перфокарт, накопитель на магнитных дисках (190 или 130) устройство связи оператора с ЭВМ. Перед началом счета оператор обязан: установить пакет дисков с каталогизированной программой FOTO на устройство 190 или 130; установить, колоду перфокарт, составленную согласно пп. 27 - 29, (карта ввода с исходными данными на устройство ввода с перфокарт OOCi); нажать клавишу «Пуск» на устройстве ООС. Счет по программе для одной пары снимков продолжается около 30 с. Контрольная тестовая задача 36. Текст программы //JOB AERO /*ФОТОТЕОДОЛИТНАЯ СЪЕМКА*/ 11.11.18 DATE 11/11/11 // OPTION LINK // UPSI 01 // EXEC PL/1 DOS/ES PL/1 COMPILER ES1H1-PL-564 V.M 1.3 AERO 11/11/11 PAGE 001 WCH: PROCEDURE OPTIONS (MAIN); 1 WCH: PROCEDURE OPTIONS (MAIN); 2 DECLARE (RAC, RAS0(200)) CHARACTER (8); DECLARE RAS2 CHARACTER (8); 4 DECLARE (N, K9, N1, M1, KS) DECIMAL FIXED (6), (XSL, YSL, ZSL, XSP, YSP, ZSP) DECIMAL FLOAT, (P, Q, F, MOX, MOZ, MOP, MOQ) DECIMAL FLOAT; 5 DECLARE (GR (20, 3), ISM (250, 4), TK (250, 4), WIS (250, 6)) DECIMAL FLOAT; 6 DECLARE (GR (20, 4), POP (250, 4), RES (2500, 3)) DECIMAL FLOAT; 7 DECLARE KOEF1 (20, 20) DECIMAL FLOAT (7), XXX (20, DECIMAL FLOAT (7), OPR (20) FLOAT EXTERNAL, X1 (20, X2 (20) DECIMAL FLOAT (7); 8 DECLARE (T, A, B, BZ, XZ1, XXI, XLX1, PR, PRR, SX, SY, SZ) DECIMAL FLOAT (7); 9 DECLARE (DEF) CHARACTER (120); 10 DECLARE KENZ CHARACTER (1); L = 1; RES = 0; 13 DECLARE(NT(20), NTKO(250)) CHARACTER(8); 14 DECLARE NAM CHARACTER (30), SD CHARACTER (8); SP CHARACTER (10), STK CHARACTER (32); 15 L = l; 16 LA = l; 17 DECLARE (XX, XZ, XL, ZL, X2X, X2Z, XLX) FLOAT DECIMAL (7); 18 DECLARE (TK1 (250, 4)) DECIMAL FLOAT (7) 19 DECLARE (OPR1 (20), OPR2 (20)) DECIMAL FLOAT (7); 20 GET EDIT (NAM, SD, STK, KS)(A (30), A(8), A(30), F(3)); 21 KS1 = KS; 22 GET EDIT (KENZ)(X(8), A(1)); 23 PUT EDIT (‘ОБРАБОТКА ФОТОТЕОДОЛИТНЫХ СНИМКОВ’)(SKIP, X(26), А); 24 PUT EDIT ((120) ‘ = ’)(SKIP, A); PUT SKIP (3); PUT SKIP (2); 27 PUT EDIT (‘ИСХОДНЫЕ ДАННЫЕ’) (SKIP, X(46), A); 28 PUT EDIT ((27) ‘-‘)(SKIP, X(46), A); 29 PUT SKIP (3); 30 PUT EDIT (‘ОБЪЕКТ’, ((37) ‘.’), NAM)(SKIP, 3А); 31 PUT EDIT (‘ЗДАНИЕ’, ((37) ‘.’), SD)(SKIP, 3А); 32 PUT EDIT (‘СТЕРЕОКОМПАРАТОР’, ((27) ‘.’), STK)(SKIP, 3А); 33 PUT EDIT (‘КОЛИЧЕСТВО ПАР СНИМКОВ’, ((21) ‘.’), KS) (SKIP, 2A, F(3)); 34 M4: GET EDIT (N, K9, N1, M1, SP, V, KENZ)(2F(l), F(2), F(3) A(10), F(1), X(61), А (1)); 35 GET EDIT (F, MOX, MOZ, MOP, MOQ, KENZ)(5F(8), X(39), A(l); 36 GET EDIT (XSL, YSL, ZSL, XSP, YSP, ZSP)(6F(10)); 37 GET EDIT (KENZ)(X(19), A(1)); 38 PUT EDIT (‘ФОКУСНОЕ РАССТОЯНИЕ АППАРАТА’, ((15) ‘.’), F)(SKIP, 2A, F(8, 3)); 39 PUT EDIT (‘НОМЕР СТЕРЕОПАРЫ’, ((27) ‘.’), SP)(SKIP, 3А); 40 PUT EDIT (‘N = ’ ((41) ‘.‘), N)(SKIP, 2A, F(2)); 41 PUT EDIT (‘K = ’, ((41) ‘,’), K9)(SKIP, A, A, F(2)); 42 PUT EDIT (‘КОЛИЧЕСТВО КОНТРОЛЬНЫХ ТОЧЕК’, ((15) ‘.’), N1)(SKIP, 2A, F(3)); 43 PUT EDIT (‘КОЛИЧЕСТВО ОПРЕДЕЛЯЕМЫХ ТОЧЕК, ((14) ‘.’), M1)(SKIP, 2A, F(3)); 44 PUT EDIT (‘ВАРИАНТ АНАЛИТИЧЕСКОЙ ОБРАБОТКИ V’, ((10) ‘.’), V)(SKIP, 2A, F(2)); 45 PUT EDIT (‘МЕСТА НУЛЕЙ ШКАЛ СТЕРЕОКОМПАРАТОРА MOXL’, ((3) ‘,’), МОХ) (SKIP, 2A, F(8, 3)); 46 PUT EDIT (‘MOZL’, ((3) ‘,’), MOZ) (SKIP, 2A, F(8, 3)); 47 PUT EDIT (‘MOZL’, ((3) ‘,’), MOZ) (SKIP, 2A, F(8, 3)); 48 PUT EDIT (Г2™» MOQ, «3),), MOQ), (SKIP, 2A, F(8, 3)); 49 PUT SKIP (3) 50 I = 1; J = 1; DOS/ES PL/1 COMPILER ES1H1-PL-V.M 1.3 - AERO 11/11/11 PAGE 002: WCH: PROCEDURE OPTIONS (MAIN); 52 M18: GET EDIT (NT(1))(A(8)); 53 DO J = 1 TO 3; 54 GET EDIT (GK(I, J))(F(10)); END; GET EDIT (KENZ)(X(41),A(1)); 57 I = I + l; IF I< = N1 THEN GOTO M18; 59 I = 1; 60 M2: GET EDIT (NTKO(1))(A(8)); 61 DO J = 1 TO 4; 62 GET EDIT (ISM(I, J))(F(8)); END; GET EDIT(KENZ)(X(39), A(1)); 65 I = I + 1; IF I < = (N1 + M1) THEN GOTO M2; /*КОНЕЦ ВВОДА ИСХОДНОЙ ИНФОРМАЦИИ*/ 67 IF K9 = 0 THEN DO; 68 PUT EDIT (‘КООРДИНАТЫ ЦЕНТРОВ ПРОЕКЦИИ В ГЕОДЕЗИЧЕСКОЙ СИСТЕМЕ КООРДИНАТ’)(SKIP, X(10), А); 69 END; 70 IF K9 = 1 THEN DO; 71 PUT EDIT (‘КООРДИНАТЫ ЦЕНТРОВ ПРОЕКЦИИ В ФОТОГРАММЕТРИЧЕСКОЙ СИСТЕМЕ КООРДИНАТ’)(SKIP, X(7), А); 72 END; PUT SKIP(2); 74 PUT EDIT (‘XГSЛ YГSЛ ZГSЛ XГSП YГSП ZГS 75 П’)(X(10):А); PUT SKIP; 77 PUT EDIT (XSL, YSL, ZSL, XSP, YSP, ZSP)(SKIP, X(10), 6F(10, 3)); 78 PUT SKIP (3); 79 IF K9 = 0 THEN DO; 80 PUT EDIT (‘ГЕОДЕЗИЧЕСКИЕ КООРДИНАТЫ КОНТРОЛЬНЫХ ТОЧЕК’) 81 (SKIP(2), X(8), A); END; 82 IF K9 = 1 THEN DO; 83 PUT EDIT (‘ФОТОГРАММЕТРИЧЕСКИЕ КООРДИНАТЫ КОНТРОЛЬНЫХ ТОЧЕК’) 84 (SKIP(2), X(7), A); END; 85 DEF = (46) ‘-‘; 86 PUT EDIT (DEF)(SKIP, X(8), A); 87 PUT SKIP; 88 I = 1, 89 M3: PUT EDIT (NT(1))(A(12)); 90 DO J = 1 TO 3; 91 PUT EDIT (GK(I, J)) (3F(11, 3)); END; PUT SKIP; 94 I = I + 1; IF K = N1 THEN GOTO M3; 96 PUT SKIP (3); 97 PUT EDIT (‘ОТСЧЕТЫ ПО ШКАЛАМ СТЕРЕОКОМПАРАТОРА’) (SKIP(2), X(10), A); 98 DEF = (54) ‘-‘; 99 PUT EDIT (DEF) (SKIP, A); PUT SKIP; 101 IF N = 3 THEN DO; 102 PUT EDIT (‘: NN ТОЧЕК : XЛ : ZЛ: XП: ZП : ‘) 103 (SKIP, A); PUT SKIP; 104 GOTO M50; END; 106 PUT EDIT (‘: NN ТОЧЕК : X : Z : P : Q : 107 (SKIP, A); PUT SKIP; 108 M50: ; 109 PUT EDIT (DEF) (SKIP, A); PUT SKIP (2); 111 PUT EDIT (‘СТЕРЕОПАРА’, SP) (SKIP (2), A, A(10)); 112 PUT SKIP; 113 I = 1; 114 M41: PUT EDIT (NTKO (I)) (A(12)); 115 DO J = 1 TO 4; 116 PUT EDIT (ISM(I, J))(4F(10, 3)); END; PUT SKIP; 119 I = I + 1; IF I < = (N1 + M1) THEN GOTO M41; 121 PUT SKIP (2); PUT SKIP (3); 123 IF K9 = 1 THEN DO; 124 PR = XSP - XSL; 125 PRR = YSL - YSP; 126 A = ATAND((YSL - YSP)/(XSP - XSL)); END; DOS/ES PL/1 COMPILER ES1H1-PL-564 V.M 1.3 AERO 11/11/11 PAGE 003: WCH: PROCEDURE OPTIONS (MAIN); 128 IF K9 = 0 THEN DO; 129 PR = XSL - XSP; 130 PRR = YSP - YSL; 131 A = ATAND((XSL - XSP)/(YSP - YSL)); END; 133 PUT SKIP (3); 134 PUT EDIT (‘РЕЗУЛЬТАТЫ РАСЧЕТА’) (SKIP, X(35), A); 135 PUT EDIT ((19) ‘-‘) (SKIP, X(35), A); 136 PUT SKIP (3); 137 A = ABS(A); 138 A1 = FLOOR (A); A2 = A - A1; A3 = A2*60; A4 = FLOOR(A3); A3 = A3 - A4; 143 A5 = A3*60; A3 = FLOOR(A5); 145 IF PR < 0 : PRR < 0 THEN A = -A; 146 B = SQRT((XSP - XSL)**2 + (YSP - YSL)**2); 147 BZ = ZSP - ZSL; 148 GF = 0; TK = 0; 150 IF K9 = 1 THEN DO; 151 DO I = 1 TO N1; 152 CF(I,1) - (GK(I, 1) - XSL)*COSD(A) + (GK(I, 2) - YSL)*SIND(A); 153 CF(I, 2) = (GK(I, 2) - YSL)*COSD(A) + (GK(I, 1) - XSL)*SIND(A); 154 GF(I,3) = GK(I,3) - ZSL; 155 GF(I,4) = GK(I,3) - ZSP; 156 END; END; 158 IF K9 = 0 THEN DO; 159 DO I = 1 TO N1; 160 GF(I, 1) = (GK(I, 2) - YSL)*COSD(A) + (GK(I,1) - XSL)*SIND(A); 161 GF(I, 2) = (GK(I,2) - YSL)*SIND(A) + (GK(I,1) - XSL)*COSD(A); 162 GF(I, 3) = GK(I,3) - ZSL; 163 GF(I,4) = GK(I,3) - ZSP; 164 END; END; /*ВЫЧИСЛЕНИЕ ТЕОРЕТИЧЕСКИХ ЗНАЧЕНИЙ КООРДИНАТ КОНТРОЛЬНЫХ ТОЧЕК*/ 166 DO I = 1 TO N1; 167 TK(I, 1) = GF(I, 1)*F/GF(I, 2); 168 TK(I, 2) = GF(I, 3)*F/GF(I, 2); 169 TK(I, 3) = (GF(I, 1) - B)*F/GF(I, 2); 170 TK(I, 4) = GF(I, 4)*F/GF(I, 2); 171 END; 172 PUT SKIP(2); /*ВЫЧИСЛЕНИЕ ИЗМЕРЕННЫХ ЗНАЧЕНИЙ КООРДИНАТ КОНТР. И ОПРЕД. ТОЧЕК*/ 173 WIS = 0; 174 IF N = 1 THEN DO; 175 DO I = 1 TO N1 + M1; 176 WIS(I, 1) = ISM(I, 1) - MOX; 177 WIS(I, 2) = ISM(I, 2) - MOZ; 178 WIS(I, 3) = WIS(I,1) - ISM(I, 3) + MOP; 179 WIS(I, 4) = WIS(I, 2) - ISM(I, 4) + MOQ; 180 END; END; 182 IF N = 2 THEN DO; DO I = 1 TO N1 + M1; 184 WIS(I, 1) = ISM(I, 1) - MOX; 185 WIS(I, 2) = ISM(I, 2) - MOZ + ISM(I, 4) - MOQ; 186 WIS(I, 3) = ISM(I, 1) - ISM(I, 3) + MOP; 187 WIS(I, 4) = ISM(I, 2) - MOZ; 188 END; END; 190 IF N = 3 THEN DO; 191 DO I = 1 TO N1 + M1; 192 WIS(I, 1) = ISM(I, 1) - MOX; 193 WIS(I, 2) = ISM(I, 2) - MOZ; 194 WIS(I, 3) = ISM(I, 3) - MOP; 195 WIS(I, 4) = ISM(I, 4) - MOQ; 196 END; END; 198 PUT SKIP (2); /*ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ*/ DOS/ES PL/I COMPILER ES1H1-PL-564 V.M 1.3 AERO 11/11/11 PAGE 004: WCH: PROCEDURE OPTIONS (MAIN); 199 IF V = l THEN PRIS = 9; IF V = 2 THEN PRIS = 11; IF V = 3 THEN PRIS = 13; 202 IF V = 4 THEN PRIS = 15; 203 IF V = 5 THEN PRIS = 13; IF V = 6 THEN PRIS = 15; 205 J = 1; 206 L1 = J; 207 MET: KOEF1 = 0; 208 DO I = 1 TO N1; 209 IF N = 1 THEN PB = ISM(1, 3); 210 IF N = 2 THEN PB = ISM(1, 3); 211 IF N = 3 THEN PB = ISM(I, 1) - ISM (I, 3); 212 X1(1) = l; X1(2) = TK(I, J)*WIS(I, J); X1(3) = TK(I, J)*WIS(I, J + 1); 215 X1(4) = WIS(I, J); X1(5) = WIS(I, J + 1); 217 IF V = 1 THEN DO; X1(6) = 0; X1(7) = 0; X1(8) = 0; X1(9) = TK(I, J) - WIS(I, J); 222************ END 223 IF V = 2 THEN DO; X1(6) = 0, X1(7) = 0; X1(8) = 0; X1(9) = 0; X1(10) = 0; 229 X1(11) = TK(I, J) - WIS(I, J); END; 231 IF V = 3 THEN DO; 232 X1(6) = TK(I, J)**2*WIS(I, J); X1(7) = 0; X1(8) = 0; X1(9) = 0; X1(10) = 0; 237 X1(11) = 0; X1(12) = 0; X1(13) = TK(I, J) - WIS(I, J); END; 241 IF V = 4 THEN DO; 242 X1(6) = TK(I, J)**2*WIS(I, J); X1(7) = TK(I, J)**2*WIS(I, J + 1); X1(8) = 0; 245 X1(13) = 0; X1(14) = 0; X1(15) = TK(I, J) - WIS(I, J); 248 X1(9) = 0; X1(10) = 0; X1(11) = 0; X1(12) = 0; END; 253 IF V = S THEN DO; 254 X1(6) = TK(I, J)*PB; X1(7) = PB; X1(8) = 0; X1(9) = 0; X1(10) = 0; X1(11) = 0; 260 X1(12) = 0; X1(13) = TK(I, J) - WIS(I, J); END; 263 IF V = 6 THEN DO; 264 X1(6) = TK(I, J)*PB; X1(7) = PB; X1(8) = 0; X1(9) = 0; X1(10) = 0; X1(11) = 0; 270 X1(12) = 0; X1(13) = 0; X1(14) = 0; X1(15) = TK(I, J) - WIS(I, J); END; 275 IF V = 1 THEN DO; 276 X2(1) = 0; X2(2) = TK(I, J + 1)*WIS(I, J); X2(3) = TK(I, J + )*WIS(I, J + 1); 279 X2(4) = 0; X2(5) = 0; X2(6) = ; X2(7) = WIS(I, J + 1); X2(8) = WIS(I, J); 284 X2(9) = TK(I, J + 1) - WIS(I, J + 1); END; 286 IF V = 2 THEN DO; 287 X2(1) = 0; X2(2) = 0; X2(3) = 0; X2(4) = 0;X2(5) = 0; X2(6) = 1; X2(7) = TK(I, J 294 + 1)*WIS(I, J); X2(8) = TK(I, J + l)*WIS(I, J + l); X2(9) = WIS(I, J + 1); 296 X2(10) = WIS(I, J); X2(11) = TK(I, J + l) - WIS(I ,J + 1); END; 299 IF V = 3 THEN DO; 300 X2(1) = 0; X2(2) = 0; X2(3) = 0; X2(4) = 0; X2(5) = 0; X2(6) = 0; 306 X2(7) = 1; X2(8) = TK(I, J + 1)*WIS(I, J); X2(9) = TK(I, J + l)*WIS(I, J + l); 309 X2(10) = WIS(I, J + 1); X2(11) = WIS(I, J); X2(12) = TK(I, J + l)**2*WIS(I, J + 1); 312 X2(13) = TK(I, J + 1) - WIS(I, J + l); 313 END; 314 IF V = 4 THEN DO; 315 X2(1) = 0; X2(2) = 0; X2(3) = 0; X2(4) = 0; X2(5) = 0; X2(6) = 0; X2(7) = 0; 322 X2(8) = 1; X2(9) = TK(I, J + 1)*WIS(I, J); X2(10) = TK(I, J + 1)*WIS(I, J + l); 325 X2(11) = WIS(I, J + 1); X2(12) = WIS(I, J); X2(13) = TK(I, J + l)**2*WIS(I, J + 1); 328 X2(14) = TK(I, J + l)**2*WIS(I, J); X2(15) = TK(I, J + 1) - WIS(I, J + l); END; 331 IF V = 5 THEN DO; 332 X2(1) = 0; X2(2) = TK(I, J + 1)*WIS(I, J); X2(3) = TK(I, J + 1)*WIS(I, J + 1); 335 X2(4) = 0; X2(5) = 0; X2(6) = 0; X2(7) = 0; X2(8) = 1; X2(9) = WIS(I, J + l); 341 X2(10) = WIS(I, J); X2(11) = TK(I, J + l)*PB; X2(12) = PB; X2(13) = TK(I, J + l) - WIS(I, J + 345 1; END; 346 IF V = 6 THEN DO; 347 X2(1) = 0; X2(2) = 0; X2(3) = 0; X2(4) = 0; X2(5) = 0; X2(6) = 0; X2(7) = 0; 354 X2(8) = 1; X2(9) = TK(I, J + 1)*WIS(I, J); X2(10) = TK(I, J + 1)*WIS(I, J + l); 357 X2(11) = WIS (I, J + l); X2(12) = WIS(I, J); X2(13) = TK(I, J + 1)*PB; 360 X2(14) = PB; X2(15) = TK(I, J + 1) - WIS(I, J + 1); END; 363 M = 1; 364 DO K6 = 1 TO N1*2; DOS/ES PL/I COMPILER ES1H1-PL-564 V.M 1.3 AERO 11/11/11 PAGE 005: WCH: PROCEDURE OPTIONS (MAIN) 365 DO L8 = 1 TO PRIS; 366 KOEF1(K6, L8) = KOEF1(K6, L8) + (X1(M)*X1(L8) + X2(M)*X2(L8)); 367 END; 368 M = M + 1; 369 END; END; 371 POR = PRIS - 1; /*ВЫЧИСЛЕНИЕ ПОПРАВОК В ИЗМЕРЕННЫЕ ЗНАЧЕНИЯ КООРДИНАТ*/ 372 CALL SIST; IF L1 = 3 THEN GOTO MET1; 374 DO L1 TO (PRIS - 1); OPR1(I) = OPR(I); END; 377 L1 = L1 + 2; J = L1; 379 IF J < = 3 THEN GOTO MET; 380 MET1: DO I = 1 TO (PRIS - 1); OPR2(1) = OPR(I); END; 383 I = N1 + 1; J = 1; 385 MET2: TK(I, J) = WIS(I, J); J = J + 1; IF J < = 4 THEN GOTO MET2; 388 J = 1; I = I + 1; IF I< = N1 + M1 THEN GOTO MET2; 391 LLL = 0; 392 MET3: PROCEDURE; 393 POP = 0; 394 DO I = 1 TO N1 + M1; 395 POP(I,1) = OPR1(1) + OPR1(2)*TK(I, 1)*WIS(I,1) + OPR1(3)*TK(I,1)*WIS(I, 2) + OPR1(4)*WIS(I, 1) + OPR1(5)*WIS(I, 2); 396 POP(I, 2) = OPR1(6) + OPR1(2)*TK(I, 2)*WIS(I,1) + OPR1(3)*TK(I,2)*WIS(I,2) + OPR1(7)*WIS(I, 2) + OPR1(8)*WIS(I, 1); 397 POP(I, 3) = OPR2(1) + OPR2(2)*TK(I, 3)*WIS(I, 3) + OPR2(3)*TK(I, 3)*WIS(I, 4) + OPR2(4)*WIS(I, 3) + OPR2(5)*WIS(I, 4); 398 POP(I, 4) = OPR2(6) + OPR2(2)*TK(I, 4)*WIS(I,3) + OPR2(3)*TK(I,4)WIS(I,4) + OPR2(7)*WIS(I, 4) + OPR2(8)*WIS(I, 3); 399 IF V>1 THEN DO; 400 POP(I, 2) = OPR1(6) + OPR1(7)*TK(I, 2)*WIS(I,1) + OPR1(8) *TK(I,2)*WIS(I, 2) + OPR1(9)*WIS(I, 2) + OPR1(10)*WIS(I,1); 401 POP(I, 4) = OPR2(6) + OPR2(7)*TK(I, 4)*WIS(I,3) + OPR2(8)*TK(I,4)*WIS(I,4) + OPR2(9)*WIS(I,4) + OPR2(10)WIS(I, 3); 402 END; 403 IF V> = 3 THEN DO; 404 POP(I,1) = POP(I,1) + OPR1(6)*TK(I, 1)**2*WIS(I,1); 405 POP(I, 2) = OPR1(7) + OPR1(8)*TK(I, 2)*WIS(I, 1) + OPR1(9)*TK(I,2)*WIS(I,2) + OPR1(10)*WIS(I,2) + OPR1(11)*WIS(I,1) + OPR1(12)*TK(I,2)**2*WIS(I,2); 406 POP(I,3) = POP(I,3) + OPR2(6)*TK(I,3)**2*WIS(I,3); 407 POP(I,4) = OPR2(7) + OPR2(8)*TK(I,4)*WIS(I,3) + OPR2(9)*TK(I,4)*WIS(I,4) + OPR2(10)*WIS(I,4) + OPR2(11)*WIS(I,3) + OPR2(12)*TK(I,4)**2*WIS(I,4); 408 END; 409 IF V> = 4 THEN DO; 410 POP(I,1) = POP(I,1) + OPR1(7)*TK(I,1)**2*WIS(I,2); 411 POP(I,2) = OPR1(8) + OPR1(9)*TK(I,2)*WIS(I,1) + OPR1(10)*TK(I,2)*WIS(I,2) + OPR1(11)*WIS(I,2) + OPR1(12)*WIS(I,1) + OPR1(13)*TK(I,2)**2*WIS(I,2) + OPR1(14)TK(I,2)**2*WIS(I,1); 412 POP(I,3) = POP(I,3) + OPR2(7)*TK(I,3)**2*WIS(I,4); 413 POP(I,4) = OPR2(8) + OPR2(9)*TK(I,4)*WIS(I,3) + OPR2(10)*TK(I,4)*WIS(I,4) + OPR2(11)*,WIS(I,4) + OPR2(12)*WIS(I,3) + OPR2(13)*TK(I,4)**2*WIS(I,4) + OPR2(14)*TK(I,4)**2*WIS(I,3); 414 END; 415 IF V> = 5 THEN DO; 416 IF N = 1 THEN PB = ISM(I,3); IF N = 2 THEN PB = ISM(I,3); 418 IF N = 3 THEN PB = ISM(I,1) - ISM(I,3); 419 POP(I,1) = OPR1(1) + OPR1(2)*TK(I,1)*WIS(I,1) + OPR1(3)*TK(I,1)*WIS(I,2) + OPR1(4)*WIS(I,1) + OPR1(5)*WIS(I,2) + OPR1(6)*TK(I,1)*PB + OPR1(7)*PB; 420 POP(I,2) = OPR1(8) + OPR1(2)*TK(I,2)*WIS(I,1) + OPR1(3)*TK(I,2)*WIS(I,2) + OPR1(9)*WIS(I,2) + OPR1(10)*WIS(I,1) + OPR1(11)*TK(I,2)*PB + OPR1(12)*PB; 421 POP(I,3) = OPR2(1) + OPR2(2)*TK(I,3)*WIS(I,3) + OPR2(3)*TK(I,3)*WIS(I,4) + OPR2(4)*WIS(I,3) + OPR2(5)*WIS(I,4) + OPR2(6)*TK(I,3)*PB + OPR2(7)*PB; DOS/ES PL/I COMPILER ES1H1-PL-564 V.M 1.3 AERO 11/11/11 PAGE 006: WCH: PROCEDURE OPTIONS (MAIN); 422 POP(I,4) = OPR2(8) + OPR2(2)*TK(I,4)*WIS(I,3) + OPR2(3)*TK(I,4)*WIS(I,4) + 423 OPR2(9)*WIS(I,4) + OPR2(10)*WIS(I,3) + OPR2(11)*TK(I,4)*PB + OPR2(12)*PB; END; 424 IF V = 6 THEN DO; 425 POP(I,2) = OPR1(8) + OPR1(9)*TK(I,2)*WIS(I,1) + OPR1(10)*TK(I,2)*WIS(I,2) + OPR1(11)*WIS(I,2) + OPR1(12)*WIS(I,1) + OPR1(13)*TK(I,2)*PB + OPR1(14)*PB; 426 POP(I,4) = OPR2(8) + OPR2(9)*TK(I,3)*WIS(I,3) + OPR2(10)*TK(I,4)*WIS(I,4)*OPR2(11)*WIS(I,4) + OPR2(12)*WIS(I,3) + OPR2(13)*TK(I,4)*PB + OPR2(14)*PB; 427 END; 428 END; 429 END MET3; 430 MET4: CALL MET3; KT1 = TK; /*ВЫЧИСЛЕНИЕ ИСПРАВЛЕННЫХ ТРАНСФОРМИРОВАННЫХ ЗНАЧЕНИЙ КООРДИНАТ*/ 432 LLL = LLL + 1; 433 DO I = 1 TO N1 + M1; 434 TK(I,1) = WIS(I,1) + POP(I,1); TK(I,2) = WIS(I,2) + POP(I,2); 436 TK(I,3) = WIS(I,3) + POP(I,3); TK(I,4) = WIS(I,4) + POP(I,4); 438 END; 439 GOTO MT2; 440 MT1: DO I = 1 TO N1 + M1; 441 TK(I,1) = TK(I,1) + POP(I,1); 442 TK(I,2) = TK(I,2) + POP(I,2); 443 TK(I,3) = TK(I,3) + POP(I,3); 444 TK(I,4) = TK(I,4) + POP(I,4); 445 END; 446 MT2: ; 447 I = 1; J = 1; 449 MET5: IF ABS(TK1(I, J) = TK(I, J))>0.001 THEN GOTO MET4; 450 J = J + 1; IF J < = 4 THEN GOTO MET5; 452 I = I + 1; J = I; 454 IF I< = (N1 + M1) THEN GOTO MET5; /*ВЫЧИСЛЕНИЕ ПРОСТРАНСТВЕННЫХ ФОТОГРАМ. КООРДИНАТ КОНТРОЛЬНЫХ И ОПРЕДЕЛЯЕМЫХ ТОЧЕК*/ 455 DO I = 1 TO N1 + M1; 456 WIS(I,1) = TK(I,1) - TK(I,3); 457 WIS(I,2) = B*TK(I,1)/WIS(I,1); 458 WIS(I,3) = B*F/WIS(I,1); 459 WIS(I,4) = B*TK(I,2)/WIS(I,1); 460 WIS(I,5) = (B*TK(I,4)/WIS(I,1)) + BZ; 461 WIS(I,6) = WIS(I,4) + WIS(I,5))/2; 463 PUT EDIT (‘ПРОСТРАНСТВЕННЫЕ ФОТОГРАММЕТРИЧЕСКИЕ КООРДИНАТЫ’) (SKIP, X(20), A); 464 I = 1; 465 MT5: PUT SKIP(3); J = 1; 467 PUT SKIP(3); 468 PUT EDIT((90) ‘-‘)(SKIP, A); 469 PR2: PROCEDURE; 470 PUT EDIT(‘:’, ‘:’, ‘:’, ‘:’, ‘:’, ‘:’, ‘:’, ‘:’)(SKIP, A, X(10), A, 6(X(12), A)); 471 END PR2; 472 CALL PR2; 473 PUT EDIT (‘:N ТОЧКИ: P: ZL: ZP: X: Y: Z:’)(SKIP, A); 474 CALL PR2; 475 PUT EDIT((90) ‘-‘)(SKIP,A); 476 MT6: CALL PR2; 477 PUT EDIT (‘:’, NTKO(I), ‘:’, WIS(I,1), ‘:’, WIS(I,4), ‘:’ WIS(I,5), ‘:’ WIS(I,2), ‘:’ WIS(I,3), ‘:’ WIS(I,6), ‘:’) 478 (SKIP, A ,A(8), A, 6(F(10,3), A)); CALL PR2; I = I + 1; J = J + 1; IF J = 20 THEN DO; 482 PUT SKIP(6); GOTO MT5; END; IF I< = N1 + M1 THEN GOTO MT6; 486 PUT EDIT((90) ‘-‘)(SKIP, A); DOS/ES PL/I COMPILER ES1H1-PL-564 V.M 1.3 AERO 11/11/11 PAGE 006: WCH: PROCEDURE OPTIONS (MAIN); /*ВЫЧИСЛЕНИЕ ГЕОДЕЗИЧЕСКИХ КООРДИНАТ*/ 487 IF K9 = 0 THEN DO; 488 I = 1; 489 M11: WIS(I,1) = XSL + WIS(I,3)*COSD(A) - WIS(I,2)SIND(A); 490 WIS(I,2) = YSL + WIS(I,3)*SIND(A) + WIS(I,2)*COSD(A); 491 WIS(I,3) = ZSL + WIS(I,6); 492 RES(L,1) = WIS(I,1); 493 RES(L,2) = WIS(I,2); 494 RES(L,3) = WIS(I,3); 405 L = L + 1; 496 I = I + 1; IF I< = (N1 + M1) THEN GOTO M11; 498 END; 499 IF K9 = 1 THEN DO; 500 I = 1; 501 M12: WIS(I,1) = XSL + WIS(I,3)*SIND(A) + WIS(I,2)*COSD(A); RES(L,1) = WIS(I,1); 503 WIS(I, 2) = YSL + WIS(I,3)*COSD(A) - WIS(I,2)*SIND(A); RES(L,2) = WIS(I,2); 505 WIS(I,3) = ZSL + WIS(I,6); RES(L,3) = WIS(I,3); L = L + 1; 508 I = I + 1; IF I< = (N1 + M1) THEN GOTO M12; 510 END; 511 PUT SKIP (3); 512 KS1 = KS1 - 1; IF KS1>0 THEN GOTO M4; 514 IF KS = 1 THEN CALL PR1; 515 SIST: PROCEDURE; 516 DECLARE (A(20,20), B(20)) DECIMAL FLOAT(7), RAB FLOAT(7); 517 I = 1; J = 1; A = 0; B = 0; 521 K1: A(I, J) = KOEF1(I, J); J = J + 1; 523 IF J < = FOR THEN GOTO K1; 524 B(I) = KOEF1(I, J); 525 J = 1;I = I + 1; 527 IF I< = FOR THEN GOTO K1; K = 1; 529 PUT SKIP(2); 530 K5: I = K + 1; LA = K; 532 K2: IF ABS(A(I, K))<ABS(A(LA, K)) THEN GOTO K3; LA = I; 534 K3: IF I<POR THEN DO; I = I + 1; GOTO K2; EHD; 538 IF LA = K THEN GOTO K8; J = K; 540 K: RAB = A(K, J); A(K, J) = A (LA, J); A(LA, J) = RAB; 543 J = J + 1; IF J< = POR THEN GOTO K4; 545 RAB = B(K); B(K) = B(LA); B(LA) = RAB; 548 K8: I = K + 1; 549 K6: RAB = A(I, K)/A(K, K); A(I, K) = 0; J = K + 1; 552 K7: A(I, J) = A(I, J) - RAB*A(K, J); J = J + 1; 554 IF J < = FOR THEN GOTO K7; 555 B(I) = B(I) - RAB*B(K); I = I + 1; 557 IF I< = POR THEN GOTO K6; K = K + 1; 559 IF K< = (POR - 1) THEN GOTO K5; I = POR; 561 OPR(I) = B(I)/A(I,1); 562 K11: I = I - 1; J = I + 1; RAB = 0; 565 K10: RAB = RAB + A(I, J)*OPR(J); J = J + 1; 567 IF J< = POR THEN GOTO K10; 568 OPR(I) = (B(I) - RAB)/A(I, I); 569 IF I>1 THEN GOTO K11; 570 PUT SKIP(3);PUT SKIP(3); 572 END SIST; 573 IF KS = 1 THEN GOTO MET10; 574 WIS = 0; I = 1; L = 1; L1 = 0; 578 MET6: WIS(I,1) = WIS(I,1) + RES(L,1); 579 WIS(I,2) = WIS(I,2) + RES(L,2); 580 WIS(I,3) = WIS(I,3) + RES(L,3); L = L + M1 + N1; L1 = L1 + 1; IF L1<KS THEN GOTO MET6; 584 L1 = 0; 585 ********** I = I + 1; L = I; IF < = N1 + M1 THEN GOTO MET6; DOS/ES PL/I COMPILER ES1H1-PL-564 V.M 1.3 AERO 11/11/11 PAGE 008: WCH: PROCEDURE OPTIONS (MAIN); 588 DO I = 1 TO N1 + M1; 589 WIS(I,1) = WIS(I,1)/KS; 590 WIS(I,2) = WIS(I,2)/KS; 591 WIS(I,3) - WIS(I,3)/KS; 592 END; 593 I = 1; L = 1; BXI1 = 0; BYI1 = 0; BZI1 = 0; L1 = 0; 599 ISM = 0; 600 MET7: BXI = RES(L,1) - WIS(I,1); ISM(I,1) = ISM(I,1) + BXI; 602 BYI = RES(L,2) - WIS(I,2); ISM(I,2) = ISM(I,2) + BYI; 604 BZI = RES(L,3) - WIS(I,3); ISM(I,3) = ISM(I,3) + BZI; 606 IF L1 = 0 THEN DO; 607 PUT EDIT(NTKO(I), BXI, BYI, BZI)(SKIP, A(9), 3F(15,6)); 608 END; 609 IF L1 = 0 THEN DO; PUT EDIT(BXI, BYI, BZI)(SKIP, X(9), 3F(15,6)); END; 612 L = L + N1 + M1; L1 = L1 + 1; IF LI < KS THEN GOTO MET7; 615 L1 = 0; I = I + 1; L = I; IF I< = N1 + M1 THEN GOTO MET7; /*ВЫЧИСЛЕНИЕ СРЕДНИХ КВАДРАТИЧЕСКИХ ЗНАЧЕНИЙ ПОГРЕШНОСТЕЙ*/ 619 DO I = 1 TO N1 + M1; 620 POP(I,1) = SQRT(ISM(I,1)/(KS - 1)); POP(I,2) = SQRT(ISM(I,2)/(KS - 1)); 622 POP(I,3) = SQRT(ISM(I,3)/(KS - 1)); END; 624 I = 1; L = 1; L1 = 0; 627 M51: BXI = RES(L,1) - WIS(I,1); BYI = RES(L,2) - WIS(I,2); BZI = RES(L,3) - WIS(I;3); 630 IF ABS(BXI)> = 3*POP(I,1)&ABS(BXI)>2*POP(I,1) THEN RES(L,1) = 111111; 631 IF ABS(BYI) > = 3*POP(I,2)&ABS(BYI)>2*POP(I,2) THEN RES(L,2) = 111111; 632 IF ABS(BZI) > = 3*POP(I,3)&ABS(BZI)>2*POP(I,3) THEN RES(L,3) = 111111; 633 L = L + N1 + M1; L1 = L1 + 1; IF L1 < KS THEN GOTO M51; 636 L1 = 0; 637 I = I + 1; L = I; IF I< = N1 + M1 THEN GOTO M51; 640 WIS = 0; I = 1; L = 1; L1 = 0; 644 M52: KS1 = KS; 645 M58: ; 646 IF RES(L,1) = 111111 : RES(L,2) = 111111 : RES(L,3) = 111111 THEN GOTO M53; 647 WIS(I,1) = WIS(I,1) + RES(L,1);WIS(I,2) = WIS(I,2) + RES(L,2); 649 WIS(I,3) = WIS(I,3) + RES(L,3); GOTO M54; 651 M53: KS1 = KS1 - 1; 652 M54: L = L + M1 + N1; L1 = L1 + 1; IF L1<KS THEN GOTO M58; 655 WIS(I,1) = WIS(I,1)/KS1; TK(I,1) = KS1; 657 WIS(I,2) = WIS(I,2)/KS1; TK(I,2) = KS1; 659 WIS(I,3) = WIS(I,3)/KS1; TK(I,3) = KS1; 661 L1 = 0: 662 I = I + 1; L = I; IF I< = (M1 + N1) THEN GOTO M52; 665 1 = 1; L = 1; L1 = 0, ISM = 0; 669 M55: BXI = RES(L,1) - WIS(I,1); ISM(I,1) = ISM(I,1) + BXI; 671 BYI = RES(L,2) - WIS(I,2); ISM(I,2) = ISM(I,2) + BYI; 673 BZI = RES(L,3) - WIS(I,3);ISM(I,3) = ISM(I,3) + BZI; 675 IF L1 = 0 THEN DO; 676 PUT EDIT(NTKO(I), BXI, BYI, BZI)(SKIP, A(9), 3F(15,6)); END; 678 IF L1 = 0 THEN DO; PUT EDIT(BXI, BYI, BZI)(SKIP, X(9), 3F(15,6)); END; 681 L = L + N1 + M1; L1 = L1 + 1; IF L1<KS THEN GOTO M55; 684 L1 = 0; I = I + 1; L = I; IF I< = (N1 + M1) THEN GOTO M55; 688 PUT EDIT(‘СРЕДНИЕ КВАДРАТИЧЕСКИЕ ЗНАЧЕНИЯ ПОГРЕШНОСТЕЙ’, ‘ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ДЛЯ’, КАЖДОЙ ТОЧКИ ПО ИЗМЕРЕНИЯМ ОДНОГО СНИМКА’)(3(SKIP,A)); 689 PUT SKIP(3); PUT EDIT((47) ‘-‘)(SKIP, A); 691 PUT EDIT(‘: НОМЕР : СРЕДНИЕ КВАДРАТИЧЕСКИЕ ПОГРЕШНОСТИ :’ ‘: : ----------------------------------------------------------------------:’, ’:ТОЧКИ : MX : MY : MZ :’) 692 (3(SKIP,A)); PUT EDIT((47) ‘-‘)(SKIP,A); PUT SKIP; 694 DO I = 1 TO N1 + M1; 695 POP(I,1) = SQRT(ISM(I,1)/(TK(I,1) - 1)); DOS/ES PL/I COMPILER ES1H1-PL-564 V.M 1.3 AERO 11/11/11 PAGE 009: WCH: PROCEDURE OPTIONS (MAIN); 696 POP(I,2) = SQRT(ISM(I,2)/(TK(I,2) - 1)); 697 POP(I,3) = SQRT(ISM(I,2)/(TK(I,3) - 1)); 698 PUT EDIT(‘:’, NTKO(I), ‘:’, POP(I,1) ‘:’, POP(I,2) ‘:’, POP(I,3) ‘:’) (SKIP, A, A(8), A, 3(F(10, 7), A)); 699 END; PUT EDIT((47) ‘-‘) (SKIP, A); PUT SKIP(3); 702 PUT EDIT (‘СРЕДНИЕ КВАДРАТИЧЕСКИЕ ПОГРЕШНОСТИ ОПРЕДЕЛЕНИЯ’, СРЕДНЕГО АРИФМЕТИЧЕСКОГО ЗНАЧЕНИЯ КООРДИНАТ’, ‘ПО ВСЕМ СНИМКАМ’) 703 (3(SKIP, A)); PUT SKIP(3); PUT EDIT((47) ‘-‘) (SKIP, A); 705 PUT EDIT(‘: НОМЕР : СРЕДНИЕ КВАДРАТИЧЕСКИЕ ПОГРЕШНОСТИ :’ ‘: : ----------------------------------------------------------------------:’, ’:ТОЧКИ : MX : MY : MZ :’) 706 (3(SKIP, A)); PUT EDIT((47) ‘-‘) (SKIP, A): PUT SKIP; 708 DO I = 1 ТО N1 + M1; 709 POP(I,1) = POP(I,1)/SQRT(TK(I,1)); 710 POP(I,2) = POP(I,2)/SQRT(TK(I,2)); 711 POP(I,3) = POP(I,3)/SQRT(TK(I,3)); 712 PUT EDIT(‘:’, NTKO(I) ‘:’, POP(I,1), ‘:’, POP(I,2), ‘:’, POP(I,3), ‘:’) (SKIP, A, A(8), A, 3(F(10,7), A)); 713 END; PUT EDIT ((47) ‘-‘) (SKIP, A); PUT SKIP(3); 716 PUT EDIT (‘СРЕДНИЕ ЗНАЧЕНИЯ КООРДИНАТ КОНТРОЛЬНЫХ И ОПРЕДЕЛЯЕМЫХ ТОЧЕК’) 717 (SKIP, X(30),A); PUT SKIP(2); 718 PUT EDIT ((59) ‘-‘) (SKIP, X(30), A); 719 PUT EDIT(‘X’, ‘Y’, ‘Z’) (SKIP, X(40), A, X(19), A, X(19)), A); 720 PUT EDIT ((59) ‘-‘) (SKIP, X(30), A); 721 DO I = 1 TO N1 + M1; 722 PUT EDIT(WIS(I,1), WIS(I,2), WIS(I,3))(SKIP, X(30), 3F(20, 4)); 723 END; 724 CALL PR1; 725 MET10: ; 726 RAS1 = ‘ ‘; 727 GET EDIT (RAC)(А(8)); 728 IF RAC = ‘ ‘ THEN GOTO XG1; 729 PUT EDIT (‘РАССТОЯНИЯ И РАЗНОСТИ КООРДИНАТ’) (SKIP, X(30), A); 730 PUT SKIP(2); 731 PUT EDIT((94) ‘-‘)(SKIP, A); 732 PUT EDIT(‘: НОМЕРА ТОЧЕК : РАЗНОСТЬ КООРДИНАТ, М : :’) (SKIP, A); 733 PUT EDIT ‘: ---------------------------------------------------:-----------------------------------------: РАССТОЯНИЯ :’) (SKIP, A); 734 PUT EDIT(‘: НАЧ. : КОН. DX : DY : DZ : :’) (SKIP, A); 735 I = 1; 736 XG3: GET EDIT(RAS1(I))(А(8)); 737 IF RAS1(I) = ’********’ THEN DO; GET EDIT(RAS2)(SKIP, A(8)); 739 I = 1; 740 GOTO XG2; END; 742 I = I + 1; GOTO XG3; 744 XG2: IF RAC = NTKO(I) THEN GOTO XG4; 745 I = I + 1; 746 IF I>(N1 + M1) THEN DO; 747 PUT EDIT (‘ ОШИБКА В НОМЕРЕ ТОЧКИ’, RAC)(SKIP, A, A(10));GOTO XG7; END; 750 GOTO XG2; 751 XG4: J = I; I = 1; K = 1; L = 0 755 XG6: IF RAS1(I) = ’********’ THEN GOTO XG7; 756 XG8: IF RAS1(I) = NTKO(K) THEN DO; 757 DX = WIS(J,1) - WIS(K,1); 758 DY = WIS(J,2) - WIS(K,2); 759 DZ = WIS(J,3) - WIS(K,3); 760 RAS = SQRT((DX**2 + DZ**2)); DOS/ES PL/I COMPILER ES1H1-PL-564 V.M 1.3 AERO 11/11/11 PACE 010; WCH: PROCEDURE OPTIONS (MAIN); 761 IF L = 0 THEN DO; 762 PUT EDIT((94) ‘-‘)(SKIP, A); 763 PUT EDIT (‘:’, RAC, ‘:’, RAS1(I), ‘:’, DX, ‘:’, DY, ‘:’, DZ, ‘:’, RAS, ‘:’) (SKIP, A, A(8), A, A(9), 4(A, F(15, 3)), A); 764 L = L + 1; 765 GOTO XG9; 766 END; 767 IF L = 0 THEN DO; 768 PUT EDIT (‘: :’, RAS1(I), ‘:’, DX, ‘:’, DY, ‘:’, DZ, ‘:’, RAS, ‘:’) (SKIP, A, A(9), A, 4(F(15,3),A)); 769 END; GOTO XG9; END; 772 K = K + 1; IF K>(N1 + M1) THEN DO; 774 PUT EDIT (‘ОШИБКА В НОМЕРЕ ТОЧКИ, RAS1(I))(SKIP, A, A(10)); GOTO XG9; END; 777 GOTO XG8; 778 XG9: I = I + 1; K = 1; GOTO XG6; 781 XG7: IF RAS2 = ’ ‘THEN DO; RAC = RAS2; I = 1; GOTO XG3: END; 786 XG1: ; 787 PUT EDIT((94) ‘-‘)(SKIP, A); 788 PR1: PROCEDURE; 789 PUT SKIP; I = 1; 791 PUT SKIP(3); 792 PUT SKIP(3); 793 PUT SKIP(3); 794 PUT EDIT (‘ КАТАЛОГ ГЕОДЕЗИЧЕСКИХ КООРДИНАТ’)(SKIP, X(19), A); 795 MT4: PUT SKIP(2); J = 1; 797 PUT SKIP(3); 798 PUT EDIT((71) ‘-‘)(SKIP, X(19), A); 799 PUT EDIT (‘:’, ‘:’, ‘:’, ‘:’, ‘:’) (SKIP, A, X(16), 3(A, X(17)), A); 800 PUT EDIT (‘: N точки. назв. : X : Y : Z :’) (SKIP, A); PUT EDIT (‘:’, ‘:’, ‘:’, ‘:’, ‘25) (SKIP, A, X(16), 3(A, X(17)), A); PUT EDIT((71) ‘-‘)(SKIP, X(19), A); MT3: PUT EDIT (‘:’, NTKO(I), ‘:’, WIS(I,1), ‘:’, WIS(I,2), ‘:’, WIS(I,3), ‘:’) (SKIP, A, A(15), A, 3(F(16,3), A)); PUT EDIT (‘:’, ‘:’, ‘:’, ‘:’, ‘:’) (SKIP, A, X(16), A, 3(X(17)), A); I = I + 1; J = J + 1; IF J = 20 THEN DO; J = 1; PUT SKIP(3); PUT SKIP(3); GOTO MT4; END; PUT EDIT((71) ‘-‘)(SKIP, A); IF I< = N1 + M1 THEN GOTO MT3; PUT SKIP(3); PUT SKIP(3); PUT SKIP(3); END PR1; PUT SKIP(3);PUT SKIP(3); PUT SKIP(3); PUT SKIP(3); END WCH;
Лист 1
Примечания: 1. N = 1, если на снимках измерялись хЛ; zЛ; p; q; N = 2, если на снимках измерялись хЛ; zП; p; q; N = 3, если на снимках измерялись хЛ; zЛ, хП; zП. 2. K = 0, если координаты контрольных точек и центров проекций даны в геодезической системе координат. K = 1, если координаты контрольных точек и центров проекции даны в фотограмметрической системе координат. 3. Вариант аналитической обработки V: V = 1 при i ≥ 4; V = 2 при i ≥ 5; V = 3 при i ≥ 6; V = 4 при i ≥ 7; V = 5 при i > 6, большой глубине и малой точности центров проекций; V = 6 при i > 7, большой глубине и малой точности центров проекций, где i - количество контрольных точек.
Лист 2ЕС-1022
Госстрой СССР ПНИИИС Карта ввода к программе «Обработка фототеодолитных снимков с известными координатами центров проекций снимков (FOTO)» Лист 3 ЕС-1022
Исходные данные подготовил ______________ Перфорировал ___________________ 37а. БЛОК-СХЕМА АЛГОРИТМА ОБРАБОТКИ ФОТОТЕОДОЛИТНЫХ СНИМКОВ С ИЗВЕСТНЫМИ КООРДИНАТАМИ ЦЕНТРОВ ПРОЕКЦИЙ
Рис. 15а
Рис. 15б
Рис. 15в
Рис. 15г 38. Печать на АЦПУ выходной информации. ОБРАБОТКА ФОТОТЕОДОЛИТНЫХ СНИМКОВ ИСХОДНЫЕ ДАННЫЕ
КООРДИНАТЫ ЦЕНТРОВ ПРОЕКЦИИ В ФОТОМЕТРИЧЕСКОЙ СИСТЕМЕ КООРДИНАТ
ФОТОМЕТРИЧЕСКИЕ КООРДИНАТЫ КОНТРОЛЬНЫХ ТОЧЕК
ОТСЧЕТЫ ПО ШКАЛАМ СТЕРЕОКОМПАРАТОРА
39. Печать на АЦПУ результатов расчета. РЕЗУЛЬТАТЫ РАСЧЕТА ПРОСТРАНСТВЕННЫЕ ФОТОГРАММЕТРИЧЕСКИЕ КООРДИНАТЫ
КАТАЛОГ ГЕОДЕЗИЧЕСКИХ КООРДИНАТ
РАССТОЯНИЯ И РАЗНОСТИ КООРДИНАТ
Приложение 4АЛГОРИТМ И ПРОГРАММА ОБРАБОТКИ АРХИВНЫХ СНИМКОВ С НЕИЗВЕСТНЫМИ ЭЛЕМЕНТАМИ ОРИЕНТИРОВАНИЯВведение к алгоритму и программе Назначение программы 1. Программа предназначена для архитектурных обмеров путем обработки пары архивных фотоснимков с неизвестными элементами внутреннего и внешнего ориентирования. Необходимым условием решения задачи является наличие на объекте в пределах площади снимка не менее пяти контрольных точек с пространственными фотограмметрическими координатами. Из этих пяти точек хотя бы одна точка не должна лежать в одной вертикальной плоскости с другими. Для контроля желательно, иметь несколько общих контрольных точек для обрабатываемой пары снимков. Программа составлена на алгоритмическом языке PL/1 и может использоваться на ЭВМ серии ЕС в операционной системе ОС с оперативной памятью не менее 256 кб. Алгоритм расчета Введение 2. При наблюдениях пары снимков общего случая съемки стереоэффект может не возникать, поэтому за основу измерений в алгоритме принято монокулярное измерение снимков, когда измерены независимо координаты xЛ, zЛ и xП, zП. Остальные системы измерений приводятся к измерениям xЛ, zЛ и xП, zП и дальнейшие вычисления выполняются по общей программе. Программа предусматривает возможность использования большого числа контрольных точек (практически это число ограничено размером оперативной памяти ЭВМ). Для количества определяемых точек ограничения нет. Программа позволяет обрабатывать снимки любого случая съемки. Тип измерительного прибора в зависимости от измеряемых величин задается кодовым числом: T = 1, если на снимках измерялись xЛ, zЛ, p, q, T = 2, если на снимках измерялись xЛ, zП, p, q; T = 3, если на снимках измерялись xЛ, zЛ, xП, zП. Элементы внутреннего и внешнего ориентирования задаются приближенно, снимки могут быть получены фотокамерами с разными фокусными расстояниями. Число контрольных точек не должно быть меньше пяти, причем хотя бы одна точка не должна лежать в одной обшей плоскости с другими точками, при этом разность отстояний между контрольными точками должна быть по возможности большей. Координаты контрольных точек должны быть взяты в фотограмметрической системе координат, соответственно и координаты определяемых точек выдаются на печать в фотограмметрической системе. 3. Исходными данными для расчета являются: кодовое число типа измерительного прибора /T/; количество контрольных точек левого снимка /nЛ/; количество контрольных точек правого снимка /nП/; количество контрольных точек общих для обрабатываемой пары снимков /п'/ точность вычислений элементов ориентирования левого и правого снимка в итерационном процессе /ε/; максимальное количество итераций при вычислениях элементов ориентирования снимков; приближенные исходные данные левого снимка (X'SЛ, X'SЛ, X'SЛ, α'Л, ω'Л, χ'Л, f'Л, x'ОЛ, z'ОЛ); и правого снимка (X'SП, X'SП, X'SП, α'П, ω'П, χ'П, f'П, x'ОП, z'ОП); места нулей шкал стереокомпаратора: если T = 1 MOxЛ, MOzЛ, MOp, MOq); если T = 2 (MOxЛ, MOzП, MOp, MOq); если T = 3 (MOxЛ, MOzЛ, (MOxП, MOzП); измерения на стереокомпараторе для контрольных точек: если T = 1 {x"Лi}ni = 1, {z"Лi}ni = 1, {p"i}ni = 1, {q"i}ni = 1; если T = 2 {x"Лi}ni = 1, {z"Пi}ni = 1, {p"i}ni = 1, {q"i}ni = 1; если T = 3 {x"Лi}nЛi = 1, {z"Лi}nЛi = 1, {x"Пi}nПi = 1, {z"Пi}nПi = 1; пространственные фотограмметрические координаты контрольных точек: {Xi}ni = 1, {Yi}ni = 1, {Zi}ni = 1; измерения на стереокомпараторе для определяемых точек: если T = 1 /x"Л, z"Л, p", q"/; если T = 2 /x"Л, z"П, p", q"/; если T = 3 / x"Л, z"Л, x"П, z"П/ 4. Вышеперечисленные данные для контроля ввода выдаются на печать. Получают следующие результаты: элементы ориентирования левого и правого снимка в процессе итераций; элементы ориентирования снимков после проведения итерационного процесса /XSЛ, YSЛ, ZSЛ, αЛ, ωЛ, χЛ, fЛ, xОЛ, zОЛ/, /XSП, YSП, ZSП, αП, ωП, χП, fП, xОП, zОП/; вычисленные фотограмметрические координаты контрольных точек, общих для левого и правого снимков, в системе пространственных фотограмметрических координат объекта /X'Ф, X"Ф, XСР, Y'Ф, Y"Ф, YСР, Z'Ф, Z"Ф, ZСР/n'i = 1 и отклонения /∆X, ∆Y, ∆Z/n'i = 1 исходных (заданных) координат контрольных точек; средние квадратические отклонения вычисленных значений координат для общих контрольных точек от их исходных значений /mX, mY, mZ/ пространственные фотограмметрические координаты определяемых точек в системе пространственных фотограмметрических координат объекта. Порядок расчета Если T = 1, то x'Лi = x"Лi - MOxЛ; z'Лi = z"Лi - MOzЛ; x'Пi = x"Лi - pi" + MOp; z'Пi = z"Лi - qi" + MOq; Если T = 2, то x'Лi = x"Лi - MOxЛ; z'Лi = z'Пi - MOzП + qi" - MOq; x'Пi = x"Лi - pi" + MOp; z'Пi = z"Пi - MOzП. Если T = 3, то x'Лi = x"Лi - MOxЛ; z'Лi = z"Лi - MOzЛ; x'Пi = x"Пi - MOxП; z'Пi = z"Пi - MOzП. a1 = cosα·cosχ - sinα·sinω·sinχ a2 = sinα·соsω; a3 = -cosα·sinχ - sinα·sinω·cosχ; b1 = -sinα·cosχ - cosα·sinω·sinχ; b2 = соsα·соsω; b3 = sinα·sinχ - cosα·sinω·cosχ; c1 = cosω·sinχ; c2 = sinω; c3 = cosω·cosχ. 7. Вычисление приближенных теоретических значений координат контрольных точек. На левом снимке:
На правом снимке:
8. Вычисление коэффициентов A, B,..., G, A' B',..., G' из которых формируются две строчки матрицы системы условных уравнений соответственно для левого и правого снимков: R = [a2(Xi - X'S) + b2(Yi - Y'S) + c2(Zi - Z'S)]-1; A = R[-a1f' + a2(x'i - x'0)]; B = R[-b1f' + b2(x'i - x'0)]; C = R[-c1f' + c2(x'i - x'0)]; D = R[f'{b1(Xi - X'S) - a2(Yi - Y'S)} - (x'i - x'0){b2(Xi - X'S) - a2(Yi - Y'S)]; E = -f'sinχ + (x'i - x'0)(tgω - (Zi - Z'S)R/cosω); F = z'i - z'0; G = (x'i - x'0)/f; A' = R[-a3f' + a2(z'i - z'0)]; B' = R[-b3f' + b2(z'i - z'0)]; C' = R[-c3f' + c2(z'i - z'0)]; D' = R[f'{b3(Xi - X'S) - a3(Yi - Y'S)} - (z'i - z'0){b2(Xi - X'S) - a2(Yi - Y'S)]; E' = -f'cosχ + (z'i - z'0)(tgω - (Zi - Z'S)R/cosω); F' = -(x'i - x'0); G' = (z'i - z'0)/f. В формулах п. 8 с целью упрощения записи опущены индексы Л и П соответственно для левого и правого снимков в следующих обозначениях: X'S, Y'S, Z'S, f', х'0, z'0, х'i, z'i, a1, …, c3. Значения X'S, Y'S, Z'S, f', x'0, z'0 являются приближенными элементами ориентирования левого и правого снимков соответственно; значения а, b, с - направляющие косинусы, вычисляемые по формулам п. 6; значения х'i, z'i - вычисляются по формулам п. 5; Xi, Yi, Zi - пространственные фотограмметрические координаты контрольных точек. 9. Составление уравнений поправок для каждой контрольной точки соответственно левого и правого снимков и формирование системы условных уравнений: AiδX'S + BiδY'S + CiδZ'S + Diδα' + Eiδω + Fiδχ' + Giδf' + δx'0 = x'i - xti - x'0; A'iδX'S + B'iδY'S + C'iδZ'S + D'iδα' + E'iδω' + F'iδχ' + G'iδf' + δz'0 = z'i - zti - z0; i = (1, nЛ,П). Обозначим вектор неизвестных δЛ = (δX'SЛ, δY'SЛ δZ'SЛ, δαЛ, δω'Л, δχ'Л, δf'Л, δx'ОЛ, δz'ОЛ), матрицу системы условных уравнений
вектор правых частей системы условных уравнений
Система условных уравнений в векторной форме будет иметь вид: для левого снимка
для правого снимка
где XT - транспонированная матрица. 11. Независимое решение
нормальных уравнений (см. п. 10) для левого и правого снимков и нахождение поправок 12. Исправление значений элементов ориентирования соответственно для левого и правого снимков итерациями, начиная с п. 6. Если обозначить вектор значений элементов ориентирования левого снимка в нулевом приближении (исходные данные)
то этот процесс можно записать в общем виде: для левого снимка -
для правого снимка: -
13. Приближения заканчивают, когда последующие значения элементов ориентирования отличаются от предыдущих не более |ε|
где ∆ - разность значений для элементов
ориентирования: ε - выбранная точность вычислений в итерационном процессе (в контрольной тестовой задаче принято ε = 0,001 мм). 14. Вычисление направляющих косинусов а, b, c для левого и правого снимков по найденным элементам ориентирования снимка после окончания итерационного процесса по формулам п. 6. xЛi = x'Лi - xОЛ; zЛi = z'Лi - zОЛ; xПi = x'Пi - xОЛ; zПi = z'Пi - zОП; i = (1, n'), где х'Лi, z'Лi, х'Пi, z'Пi берутся соответственно из п. 5, а значения
хОЛ, zОЛ, хОП, zОП из последнего
приближения векторов
где хЛi, zЛi, хПi, zПi берутся из п. 15, а, b, c - из п. 14.
X'Л = KЛxЛti; Y'Л = KЛfЛ; Z'Л = KЛzЛti;
X'П = KПxПti; Y'П = KПfЛ; Z'П = KПzПti; X'Ф = XSЛ + X'Л; X"Ф = XSП + X'П; XCP = 0,5(X'Ф + X"Ф); Y'Ф = YSЛ + Y'Л; Y"Ф = YSП + Y'П; YCP = 0,5(Y'Ф + Y"Ф); Z'Ф = ZSЛ + Z'Л; Z"Ф = ZSП + Z'П; ZCP = 0,5(Z'Ф + Z"Ф); 19. Вычисление отклонений исходных координат общих контрольных точек от их вычисленных значений: ∆Xi = Xi - XCPi; ∆Yi = Yi - YCPi; ∆Zi = Zi - ZCPi. 20. Определение значений средних квадратических отклонений вычисленных значений координат для общих контрольных точек от их исходных значений:
21. Ввод данных измерений снимков для определяемых точек. 22. Приведение различных систем измерений снимков к измерениям хЛ, zЛ, хП, zП с учетом кодового числа выполняется по формулам п. 5. 23. Вычисления пространственных фотограмметрических координат определяемых точек выполняются по формулам, приведенным в пп. 15 - 18. ПРОГРАММА Описание программы 24. Программа составлена согласно приведенному выше алгоритму и состоит из главной процедуры FOTOGM и шести внешних процедур PRINT, GR, HCOS, SIST, в которые входит внутренняя процедура KOEF, RSY, FINA. В главной процедуре FOTOGM организован ввод-вывод исходных данных, результатов расчета по пунктам алгоритма (см. пп. 5 - 23), а также вспомогательные вычисления, которые требуются для работы программы. Кроме того, происходит обращение к подпрограммам PRINT, GR, HCOS, SIST, FINA. 25. Процедура PRINT предназначена для печати вычисленных значений элементов ориентирования левого и правого снимков. Входные величины (формальные параметры) для этой процедуры - массивы данных левого (DSL) и правого (DSP) снимков. Обращение - CALL PRINT (DSL, DSP). Длина процедуры 7196 бит, количество операторов 67, количество перфокарт 48. 26. Процедура GR предназначена для перевода градусной меры углов в радианную, а также для обратного преобразования. Эти преобразования необходимы для задания исходных данных угловых элементов ориентирования в градусной мере. Входные величины (формальные параметры) для этой процедуры: J - число +1, если отсчет угла производится против часовой стрелки, и -1, если отсчет угла производится по часовой стрелке; G - градусы угла отсчета; M - минуты угла отсчета; S - секунды угла отсчета; R - радианы; I - параметр направления преобразования; если I = '1'В, то преобразование градусной меры угла в радианную; если I = '0'В, то преобразование радианной меры угла в градусную. Обращение CALL GR(J1, G1, M1, S1, R1, I1), где J1, G1, M1, S1, R1, I1 - фактические параметры, имеющие тот же смысл, что и формальные параметры. Длина процедуры - 506 бит, количество операторов - 22, количество перфокарт на которых располагается процедура - 12. 27. Процедура HCOS предназначена для вычисления направляющих косинусов по формулам п. 6 алгоритма. Входные величины - углы: а - обозначение через формальный параметр A; ω - обозначение через формальный параметр W; χ - обозначено через формальный параметр K. Углы задаются в радианах. Выходные величины - массив С направляющих косинусов. При этом принят следующий порядок формирования массива С = (a1, a2, a3, b1, b2, b3, c1, c2, c3). Обращение CALL HCOS (A1, W1, K1, C1), где A1, W1, K1, C1 - фактические параметры: A1, W1, K1 - входные параметры (углы), C1 - требуемый массив направляющих косинусов. Длина процедуры - 646 бит, количество операторов - 20, количество перфокарт - 8. 28. Процедура SIST предназначена для формирования системы условных уравнений, а также нормальных уравнений. Эта процедура обращается в процессе работы к двум процедурам: внутренней KOEF и внешней RSY, где происходит решение систем уравнений п. 10, после этого вычисляется новое приближение - вектор по формулам п. 12. Входные величины (формальные параметры): SP - вектор значений элементов ориентирования снимка, являющихся и выходным массивом; CP - вектор направляющих косинусов снимка; XSP - вектор преобразованных измерений (из п. 5); ZSP - вектор преобразованных измерений (из п. 5); X, Y, Z - векторы пространственных фотограмметрических координат контрольных точек; XPT, ZPT - векторы теоретических значений координат контрольных точек снимка (из п. 7); N - размерность векторов XSP, ZSP; N2 - число; N2 = 2*N - размерность рабочих массивов RAT, FF. Выходные величины: F - вектор поправок к вектору SP, т.е. решение системы уравнений п. 10. Обращение к подпрограмме: CALL SIST (S, C, XS, ZS, X, Y, Z, XT, ZT, F, N, N2), где S, C, XS, ZS, XT, ZT - векторы для соответствующего снимка; N, N2 - соответствующие размерности. Длина процедуры - 4047 бит, количество операторов - 72, количество перфокарт - 34. 29. Процедура KOEF предназначена для вычисления коэффициентов A,..., G и A', …, G' по формулам п. 8. Входные величины передаются через формальные параметры C, S, XS, ZS, X, Y, Z, а выходные значения получаются в виде нелокализованных массивов W и W1, которые формируются следующим образом. В массив W записаны величины A,..., G, а в массив W1 - A', …, G'. Назначение формальных параметров: C - массив направляющих косинусов снимка; S - вектор значений элементов ориентирования снимка; XS, ZS - элементы массивов (см. п. 5); X, Y, Z - элементы массивов пространственных фотограмметрических координат контрольных точек. Обращение к процедуре KOEF происходит внутри процедуры SIST оператором CALL KOEF (CP, SP, XSP(I), ZSP(I), X(L), Y(L), Z(L). Описание смысла фактических параметров приведено в п. 28. 30. Процедура RSY предназначена для решения системы нормальных уравнений, т.е. системы линейных уравнений с симметричной матрицей (см. пп. 10 и 11). Для этого использован метод квадратных корней. Входные параметры процедуры: N - порядок системы (число неизвестных); F - массив коэффициентов правых частей; там же получаем решение системы; А - матрица коэффициентов системы линейных алгебраических уравнений, записанная верхним треугольником по строкам в виде одномерного массива размерности N(N + 1)/2. Длина программы - 2138 бит, количество операторов - 62, количество перфокарт - 28. 31. Процедура FINA предназначена для вычислений трансформированных значений координат для общих контрольных точек или для определяемых точек левого и правого снимков (см. п. 16), а также для вычисления пространственных фотограмметрических координат общих контрольных точек (или определяемых) в базисной системе координат (см. п. 17). Кроме того, производится вычисление пространственных фотограмметрических координат общих контрольных (или определяемых) точек в системе пространственных фотограмметрических координат объекта (см. п. 18). Входные параметры передаются через формальные параметры процедуры SL, CL, SP, CP, а также через параметры XL, ZL, XP, ZP, BC, BS, которые описаны как EXTERNAL, и их значения вычисляются в основной процедуре. Параметры SL, CL и SP, CP - данные снимков и направляющие косинусы соответственно левого и правого снимков. Параметры XL, ZL, ХР, ZP - элементы массивов хЛi, zЛi, хПi, zПi из п. 15. Параметры BC, BS носят вспомогательный характер, это значение выражений BC = Qcosψ и BC = Qsinψ из формул п. 17. Выходными параметрами являются: X1, X2, XI, которые в алгоритме обозначены как X'Ф, X"Ф, ХCP; Y1, Y2, YI в алгоритме обозначены как Y'Ф, Y"Ф, YCP; Z1, Z2, ZI в алгоритме обозначены как Z'Ф, Z"Ф, ZCP. Длина подпрограммы - 1222 бита, количество операторов - 24, количество перфокарт - 17. Таблица условных обозначений и идентификаторов программы 32. В таблицу включены основные идентификаторы, которыми обозначены величины из алгоритма. Идентификаторы, не вошедшие в таблицу, носят вспомогательный характер и используются как рабочие.
33. БЛОК-СХЕМА ПРОГРАММЫ «ОБРАБОТКА ФОТОТЕОДОЛИТНЫХ СНИМКОВ С НЕИЗВЕСТНЫМИ КООРДИНАТАМИ ЦЕНТРОВ ПРОЕКЦИЙ»
Рис. 16а
Рис. 16б
Рис. 16в
Рис. 16г
Рис. 16д
Рис. 16е
Рис. 16ж 34. Текст программы FOT 0001 //GM7P001A JOB MSGLEVEL = (2, 0) FOT 0002//SCG EXEC PL1LFCG, PARM.PL1L = ‘NOL, NA, NT, SKE, SIZE = 999999,0 = 2’, FOT 0003// PARM.GO = ‘SIZE = 0170K’ FOT 0004 //PL1L.SYS1N DD* FOT 0005 FOTOGM: PROG OPTIONS (MAIN); FOT 0006. DCL (M, Ml, M2, M4, NL, NP, NN, N1) FIXED(3) EXT; FOT 0007 DCL (N2L, N2P) FIXED(3); FOT 0008 DCL (BC, BS) EXT; FOT 0009 DCL ‘XL, ZL, XP, ZP) EXT; FOT 0010 DCL Т FIHED(1), FOT 0011 (N, ITER) FIXED DEC(3), KITER BIT(1), KOLI FIXED DEC(3); FOT 0012 DCL TABL FILE, 1 WIWOD, 2 XI, 2 VI, 2 ZI; FOT 0013 M = 9; M1 = 18; FOT 0014 RORAD = 1; GET LIST(T, NL, NP, NN, EPS, KOLI); FOT 0015 N = NL + NP - NN; FOT 0016 M4 = M - 1; M2 = M - 2; N1 = M*(M + 1)/2; N2L = 2*NL; N2P = 2*NP; FOT 0017 PUT EDIT(‘!’, (65) ‘ = ’, ‘!’)(SKIP(8), X(6), 3 A); FOT 0018 PUT EDIT(‘!’, ’I’, ’l’, ’!’)(SKIP, X(6), A, X(13), A, X(28), A, X(22). A); FOT 0019 PUT EDIT(‘! КОД T = “T, I КОНТРОЛЬНЫХ ТОЧЕК = ’, N, FOT 0020 I ОБЩИХ ТОЧЕК = ‘, NN, ‘!’)(SKIP, X(6), A, F(2), A, F(1), A, F(4), A); FOT 0021 PUT EDIT(‘!’, ’I’, ’l’, ’!’)(SKIP, X(6), A, X(13), A, X(28), A, X(22), A); FOT 0022 PUT EDIT (‘ ЛЕВОГО = ’, NL, ‘ПРАВОГО = ’, NP)(SKIP(0), X(22), (A, F(3), X(3))); FOT 0023 PUT EDIT(‘!’, (65)’-‘,’!’)(SKIP, X(6), 3A); FOT 0024 PUT EDIT (‘!’, ’I’, ’!’)(SKIP, X(6), A(32), A(34), A); FOT 0025 PUT EDIT(‘! ТОЧНОСТЬ ПРИБЛИЖЕНИЯ = ’, EPS, ‘IМАКС.’, FOT 0026 ‘КОЛИЧЕСТВО ИТЕРАЦИЙ = ’, KOLI, ’!’)(SKIP, X(6), A, F(7, T), A, A, F(4), A) FOT 0027 PUT EDIT (‘!’, ‘I’, ’!’)(SKIP, X(6), A(32), A(4), A); FOT 0028 PUT EDIT (‘!’, (65) ‘ = ’, ‘!’)(SKIP, X(6), 3 A); FOT 0029 BLOK: BEGIN; FOT 0030 DCL, DSL(M1), DSP(Ml), SL(M), SP(M), FF(M), F(M), CL(M), CP(M). FOT 0031 X(N), Y(N), Z(N), FOT 0032 X1(NL), X2(NL), X3(NP), X4(NP), FOT 0033 XLT(NL), ZLT(NL), XPT(NP), ZPT(NP), FOT 0034 (I, K, J, L) FIXED(3), MO(4), FLOAT(6), SLD(M), SPD(M), FOT 0035 SS DEC(12), FOT 0036 XSL(NL), ZSL(NL), XSP(NP), ZSP(NP); FOT 0037 DCL (SSA, SSB, SSD, SSL, SSE, SSF, SSR) CHAR(150) VAR; FOT 0038 GET LIST(DSL, DSP); FOT 0039 GET LIST(MO); FOT 0040 GET LIST(X1, X2, X3, X4); FOT 0041 GET LST (X, Y, Z); FOT 0042 PUT EDIT (‘!’,(65) ‘ = ’, ‘!’)(SKIP, X(6), 3 A); FOT 0043 PUT EDIT (‘!’, (65)’, ’, ’!’, ’!’, ’!’, ’!’, ’приближенные’, FOT 0044 ’!’, ’!’, ’!’)(SKIP, X(6), 3А, COL(7), A(66), A, COL(7), A(22), (44) FOT 0045, A, SKIP, X(6), A(66), A); FOT 0046 CALL PRINT (DSL, DSP); FOT 0047 DO I = 1 TO 3; SL(I) = DSL(I); SP(I) = DSP(I); J = 4*I; FOT 0048 CALL GR(DSL(J), DSL(J + 1), DSL(J + 2), DSL(J + 3), SL(I + 3), ‘1’В); FOT 0049 CALL GR(DSR(J), DSP(J + D, DSP(J + 2), DSP(J + 3), SP(I + 3), ‘1’В); FOT 0050 SL(I + 6) = DSL(I + 15); SP(I + 6) = DSP(I + 15); END; FOT 0051 SSA = ’!’!! (65) ‘ = ’ !!’!’; SSB = ’!’!! (65) ‘ = ’ !!’!’; FOT 0052 SSD = ’!’!! (65) ‘ = ’ !!’!’; SSL = ’!’!! (65) ‘ = ’ !!’!’; FOT 0053 SSR = ’!’!! (65) ‘ = ’ !!’!’; FOT 0054 PUT EDIT(SSA, SSB, SSB)(SKIP(3), X(6), 3(A, COL(7))); PUT EDIT ( FOT 0055 ‘(MM)’)(SKIP(0), X(68), A); PUT EDIT( FOT 0056 ‘нули шкал стереокомпаратора’, SSB, SSD)(SKIP FOT 0057 (0), X(10), A, 2(COL(7), A)); SSE = ‘! I’!!(29)’ ‘!!’Í’!!(29)’ ‘!!’!’; FOT 0058 SSF = ‘! T I’!!(12)’ ‘!!’МОЛ’!!(12)’ ‘!!’I’! !(12)’’!!’МОЛ’ !! FOT 0059 (12)’ ‘!!’!’; PUT EDIT (SSE, SSF, SSR)(COL(7), A); SOL; FORMAT(COL(7), A); FOT 0060 SSF = ’! I’!!(14)’ ’! I’!!(14)’ ’! I’!!(14)’ ’! I’!!(14)’’ FOT 0061 !!’!’; PUT EDIT(SSF SSF)R(SOL)); FOT 0062 PUT EDIT(T, MO, SSF, SSA)(SKIP(0), F(10), 4F(15, 3), 2(COL(7), A)); FOT 0063 PUT EDIT(SSA, SSL, SSB, SSB)(SKIP(3), X(6), 4(A, COL(7))); PUT EDIT( FOT 0064 ‘ИЗМЕРЕНИЯ НА СТЕРЕОКОМПАРАТОРЕ’ FOT 0065, SSB, SSB)(SKIP(0), X(9), A, 2(COL(7), A)); FOT 0066 PUT EDIT(‘(MM)’)(SKIP(0), X(65), A); FOT 0067 PUT EDIT (‘ДЛЯ КОНТРОЛЬНЫХ ТОЧЕК’, SSD)( FOT 0068 SKIP(0), X(18), A, COL(7), A); FOT 0069 PUT EDIT(SSF, SSF)(R(SOL)); FOT 0070 IF T = 1 THEN PUT EDIT (‘N, ‘Xл’, ‘Zл’, ‘Р’, ‘Q’)(R(BBB)); FOT 0071 IF T = 2 THEN PUT EDIT (‘N, ‘Xп’, ‘Zп’, ‘Р’, ‘Q’)(R(BBB)); FOT 0072 ELSE PUT EDIT(‘N, ‘Xл’, ‘Zл’, ‘Xп’, ‘Zп’)(R(BBB)); FOT 0073 AAA:FORMAT(SKIP(0), F(11), F(13, 3), 3 F(15,3)); FOT 0074 BBB:FORMAT(SKIP(0), X(9), A(10), 4 A(15)); FOT 0075 PUT EDIT(SSF)(R(SOL)); PUT EDIT((65) ‘-‘)(SKIP(0), X(7), A); FOT 0076 DO I = 1 TO N; PUT EDIT(SSF, SSF)(R(SOL)); FOT 0077 IF I< = NN THEN FOT 0078 PUT EDIT(I, X1(I), X2(I), X3(I), X4(I))(R(AAA)); FOT 0079 ELSE IF I< = NL THEN PUT EDIT(I, ‘л’, Х1(I), Х2(I) FOT 0080 (SKIP(0), F(11), A, F(12,3), F(15,3)); FOT 0081 ELSE DO; J = I - NL + NN; PUT EDIT(I, ‘п’, Х3(J), X4(J)) FOT 0082 (SKIP(0), F(11), A, X(27), 2F(15,3)); END; FOT 0083 PUT EDIT(SSF, SSL)(R(SOL)); END; PUT EDIT(SSA)(R(SOL)); FOT 0084 PUT EDIT(SSA, SSL, SSB, SSB)(SKIP(3), X(6), 4(A, COL(7))); PUT EDIT( FOT 0085 ‘ФОТОГРАММЕТРИЧЕСКИЕ КООРДИНАТЫ’, SSB, FOT 0086 SSB)(SKIP(0), X(10), A, 2(COL(7), A)); PUT EDIT( FOT 0087 ‘КОНТРОЛЬНЫХ ТОЧЕК (М)’, SSD)(SKIP(0) FOT 0088, X(22), A, COL(7), A);SSF = ’! I’!!(19)’ ‘!!’!’! !(19)’ ‘!!’!’!! FOT 0089 (19)’ ‘!!’!’; PUT EDIT(SSF, SSF)(R(SOL)); PUT EDIT(‘N, ‘X’, ‘Y’, ‘Z’, SSR) FOT 0090 (SKIP(0), X(9), A(14), A(19), A(20), A, COL(7), A); FOT 0091 DO I = 1 TO N; PUT EDIT(SSF, SSF)(R(SOL)); PUT EDIT(I, X(I), Y(I), Z(I)) FOT 0092 (SKIP(0), F(11), F(16,3), F(19,3),F(20,3)); FOT 0093 IF I>NN THEN DO; FOT 0094 IF I< = NL THEN PUT EDIT(‘л’)(SKIP(0), X(11), A); FOT 0095 ELSE PUT EDIT(‘п’)(SKIP(0), X(11), A); END; FOT 0096 PUT EDIT(SSF, SSL)(R(SOL)); EHD; PUT EDIT(SSA)(R(SOL)); FOT 0097 YMIN = Y(1); XMAX = X(1); DO I = 2 TO N; IF X(I)>XMAX THEN XMAX = X(I); FOT 0098 IF Y(I)<YMIN THE YMIN = Y(I); END; FOT 0099 DO I = 1 TO M; SLD(I), SPD(I) = 0; END; FOT 0100 DO I = 1 TO NN; FOT 0101 XSL(I) = X1(I) - MO(1); ZSL(I) = X2(I) - MO(2); XSP(I) = X3(I) - MO(3); FOT 0102 IF T = 2 THEN DO; ZSL(I) = X4(I) - MO(4) + ZSL(I); ZSP(I) = X2(I) - FOT 0103 MO(2); END; IF T = 3 THEN XCP(I) = X1(I) - XSP(I); FOT 0104 IF T = l THEN ZSP(I) = X2(I) - X4(I) + MO(4); FOT 0105 IF T = 3 THEN ZSP(I) = X4(I) - MO(4);: END; FOT 0106 IF T = 3 THEN DO; J = NN + 1; FOT 0107 DO I = J TO NL; XSL(I) = X1(I) - MO(1); ZSL(I) = X2(I) - MO(2); END; FOT 0108 DO I = J TO NP; XSP(I) = X3(I) - MO(3); ZSP(I) = X4(I) - MO(4); END; END; FOT 0109 SSA = ’!’!!(114) ‘ = ’ !!’!’; SSD = ’!’!!(114) ‘ + ’ !!’!’; FOT 0110 SSB = ’!’!!(114) ‘ ’ !!’!’; SSL = ’!’!!(114) ‘-’ !!’!’; FOT 0111 SSR = ’!’!!(114) ‘*’ !!’!’; SSF = ’!’!!(11) ‘ ’; FOT 0112 SSF = ‘!’!! REPEAT (SSF, 8) !!’!’; FOT 0113 PUT SKIP(5); SOT: FORMAT(COL(5), A); FOT 0114 PUT EDIT(SSA, SSF, SSF)(R(SOT)); PUT EDIT(‘снимок’, ‘X’, ‘Y’, ‘Z’, ‘A’, FOT 0115 ‘W’, ‘K’, ‘F’, ‘XO’, ‘ZO’, SSF, SSD)(SKIP(0), X(5), A(13), 8A(12), A, FOT 0116 2(SOL(5), A)); FOT 0117 ITER = 0; START: ITER = ITER + 1; FOT 0118 CALL HCOS(SL(4), SL(5), SL(6), CL); FOT 0119 CALL HCOS(SP(4), SP(5), SP(6), CP); FOT 0120 DO I = 1 TO NL FOT 0121 XX = X(I) - SL(1); YY = Y(I) - SL(2); ZZ = Z(I) - SL(3); FOT 0122 R = SL(7)/(CL(2)*XX + CL(5)*YY + CL(8)*:ZZ); FOT 0123 XLT(I) = R*(CL(1)*XX + CL(4)*YY + CL(7)*ZZ); FOT 0124 ZLT(I) = R*(CL(3)*XX + CL(6)*YY + CL(9)*ZZ); FOT 0125 END; K = NL - NN; FOT 0126 DO I = 1 TO NP; IF I>NN THEN J = K + I; ELSE J = I; FOT 0127 XX = X(J) - SP(1); YY = Y(J) - SP(2), ZZ = Z(J) - SP(3); FOT 0128 R = SP(7)/(CP(2)*XX + CP(5)*YY + CP(8)*ZZ); FOT 0129 XPT(I) = R*(CP(1)*XX + CP(4)*YY + CP(7)*ZZ); FOT 0130 ZPT(I) = R(CP(3)*XX + CP(6)*YY + CP(9)*ZZ); END; FOT 0131 CALL SIST(SL, CL, XSL, ZSL, X, Y, Z, XLT, ZLT, F, NL, N2L); FOT 0132 FF(1), FF(2), FF(3) = SL(7)/YMIN; FF(9) = XMAX/SL(7); FOT 0133 FF(4), FF(5), FF(6) = SL(7)/RORAD; FF(7), FF(8) = 1; FOT 0134 KITER = ’1’B; DO I = 1 TO M; IF ABS(FF(I)*(F(I) - SLD(I)))>EPS THEN FOT 0135 DO; KITER = ’0’B; GO TO BOH; END; BOH:SLD = F; FOT 0136 CALL SIST(SP, CP, XSP, ZSP, X, Y, Z, XPT, ZPT, F, NP, N2P); FOT 0137 PUT EDIT(SSB, SSB)(R(SOT)); PUT EDIT(‘итерация = ’, ITER, FOT 0138 SSR, SSF) (SKIP(0), X(13), A, F(5), 2(COL(5), A)); FOT 0139 PUT EDIT(‘левый’, SL, SSF)(SKIP(0), X(5), A(6), 9F(12,4), COL(5), A); FOT 0140 PUT EDIT(SSL, SSF)(SKIP(0), X(4), A, COL(5), A); FOT 0141 PUT EDIT(‘правый’, SP, SSR)(SKIP(0), X(5), A(6), 9 F(12,4), COL(5), A); FOT 0142 IF KITER = ’0’B THEN DO; CHOBA:SPD = F; IF ITER<KOLI THEN FOT 0143 GO TO START; ELSE GO TO KOHES; END; FOT 0144 FF(1), FF(2), FF(3) = SP(7)/YMIN; FF(9) = XMAX/SP(7); FOT 0145 FF(4), FF(5), FF(6) = SP(7)/RORAD; FF(7), FF(8) = 1; FOT 0146 DO I = 1 TO M; IF ABS(FF(I)*(F(I) - SPD(I)))>EPS THEN FOT 0147 DO; KITER = ’0’B; GO TO СНОВА; END; END; KOHES: FOT 0148 PUT EDIT(SSA)(R(SOT)); FOT 0149 IF KITER = ’0’B THEN PUT EDIT(‘точность’, EPS, ‘после’, KOLI, FOT 0150 ‘итераций не достигнута’)(SKIP(2), X(32), A, F(10,6), X(3), A, F(5), FOT 0151 X(3), A); ELSE PUT EDIT(‘решение найдено’)(SKIP(2), X(52), А); FOT 0152 PUT EDIT(SSA)(R(SOT)); PUT SKIP(8); FOT 0153 PUT EDIT(‘!’, (65) ‘ = ’, ‘!’)(SKIP, X(6), 3 A); FOT 0154 PUT EDIT(‘!’, (65)’,’, ‘!’, ‘!’, ‘!’, ‘!’, ‘полученные’, FOT 0155 ‘!’, ‘!’, ‘!’)(SKIP(1, X(6), 3A, COL(7), A(66), A, COL(7), A(24), A(42), A, FOT 0156 COL(7), A(66), A); FOT 0157 PUT EDIT(‘!’, ‘!’)(SKIP, X(6), A(66), A); FOT 0158 DO I = 1 TO 3; DSL(I) = SL(I); DSP(I) = SP(I); J = 4*I; FOT 0159 COLL GR(DSL(J), DSL(J + 1), DSL(J + 2), SL(I + 3), ‘0’B); FOT 0160 CALL GR(DSP(J), DSP(J + 1), DSP(J + 2), DSP(J + 3), SP(I + 3), ‘0’B); FOT 0161 DSL(I + 15) = SL(I + 6);DSP(I + 15) = SP(I + 6); END; FOT 0162 CALL PRINT(DSL, DSP); FOT 0163 CALL HCOS(SL(4), SL(5), SL(6), CL); FOT 0164 CALL HCOS(SP(4), SP(5), SP(6), CP); FOT 0165 XX = SP(1) - SL(1); YY = SP(2) - SL(2); ZZ = SORT(XX*XX + YY*YY); FOT 0166 A = SIGN(YY); IF XX = 0 THEN DO; R = ATAN(YY/XX); FOT 0167 IF XX<0 THEN R = R + 3.1415926*(A*(1 - A) + 1); FOT 0168 END; ELSE R = 1.5707963*A; FOT 0169 BC = ZZ*COS(R); BS = ZZ*SIN(R); XM, YM, ZM = 0; FOT 0170 ON ENDFILE (SYSIN) GO TO FINIS; FOT 0171 OPEN FILE (TABL) OUTPUT RECORD; FOT 0172 IF NN = 0 THEN GO TO SKOK; FOT 0173 SSA = ’!’!!(67) ‘ = ’!!’!’; SSD = ’!’!!(67) ‘ + ’!!’!’; FOT 0174 SSB = ’!’!!(67) ‘.’!!’!’; SSR = ’!’!!(67) ‘*’!!’!’; FOT 0175 SSF = ’I’; SSF = ‘!’!! REPEAT(SSF, 5) !!’!’; FOT 0176 SSL = ’!’!!(19) ‘ ’; SSL = ‘!’!! REPEAT(SSL, 5) !!’!’; FOT 0177 PUT SKIP(3); FOT 0178 PUT EDIT(SSA, SSB, SSB)(R(SOL)); PUT EDIT( FOT 0179 ‘ФОТОГРАММЕТРИЧЕСКИЕ КООРДИНАТЫ КОНТРОЛЬНЫХ ТОЧЕК’, SSB)(SKIP(0), FOT 0180 X(16), A, COL(7), A); PUT EDIT(SSB, SSB, ‘(M)’)( FOT 0181 2(COL(7), A), SKIP(0), X(60), A); FOT 0182 PUT EDIT(‘ОТКЛОНЕНИЕ ИСХОДНЫХ ОТ ВЫЧИСЛЕННЫХ’, SSB, SSD, SSF) FOT 0183 (SKIP(0), X(20), А, 3(COL(7), A)); FOT 0184 PUT EDIT(‘Xфл’, ‘Xфп’, ‘Yфл’, ‘Yфп’, ‘Zфл’, ‘Zфп’, SSF, FOT 0185 (59)’*’, SSL, SSL)(SKIP(0), X(17),6 A(10), COL(7), A ‘SKIP(0), X(15), A, FOT 0186 2(COL(7), A)); PUT EDIT(‘точка’, ‘X среднее’, ‘Y среднее’, ‘Z среднее’, FOT 0187 SSL, (59) ‘-‘, SSL(SKIP(0), X(8), A(12), FOT 0188 3A(20), COL(7), A, SKIP(0), X(15), A, COL(7), A); FOT 0189 PUT EDIT(‘ОТКЛОНЕНИЕ ПО X’, ‘ОТКЛОНЕНИЕ ПО Y’, ‘ОТКЛОНЕНИЕ ПО Z’ FOT 0190, SSR)(SKIP(0), X(16), 3А(20), COL(7), A); FOT 0191 DO I = 1 TO NN; FOT 0192 XL = XSL(I) - SL(8); ZL = ZSL(I) - SL(9); FOT 0193 XP = XSP(I) - SP(8); ZP = ZSP(I) - SP(9);. FOT 0194 CALL FINA(SL, CL, SP, CP, XXL, XXP, XI, YYL, YYP, YI, ZZL, ZZP, ZI); FOT 0195 DX = X(I) - XI; DY = Y(I) - YI; DZ = Z(I) - ZI; FOT 0196 XM = XM + DX*DX; YM = YM + DY*DY; ZM = ZM + DZ*DZ; FOT 0197 PUT EDIT(SSF)(R(SOL)); FOT 0198 PUT EDIT(XXL, XXP, YYL, YYP, ZZL, ZZP)( FOT 0199 SKIP(0), F(24,3), 5 F(10,3)); PUT EDIT(SSF, (59) ‘ ‘, SSL, SSL, FOT 0200 I, XI, YI, ZI, SSL)(COL(7), A, SKIP(0), X(15), A, 2(COL(7), A), FOT 0201 SKIP(0), F(12), F(l7,3), 2 F(20,3), COL(7), A); FOT 0202 PUT EDIT((59) ‘-‘, SSL, DX, DY, DZ, SSR)(SKIP(0), X(15), A, FOT 0203 COL(7), A, SKIP(0), F(27,3), 2 F(20,3), COL(7), A); FOT 0204 END; FOT 0205 XM = SQRT(XM/NN), YM = SQRT(YM/NN); ZM = SQRT(ZM/NN); FOT 0206 PUT EDIT(SSA, SSB, SSB)(R(SOL)); PUT EDIT( FOT 0207 ‘(M)’)(SKIP(0), X(65), A); PUT EDIT( FOT 0208 ‘средние квадратические отклонения’, SSB, SSB)(SKIP(0), FOT 0209 X(22), A, 2(COL(7), A)); FOT 0210 PUT EDIT(‘MX’, ‘MY’, ‘MZ’, SSB, SSB)(SKIP(0), X(21), 3 A(18), 2(COL(7), A)); FOT 0211 PUT EDIT(XM, YM, ZM, SSB, SSA)(SKIP(0), F(28, 5), 2 F(18, 5), 2(COL(7). A)); FOT 0212 SKOK: I = 0; WWOD: GET LIST(Y1, Y2, Y3, Y4); I = I + 1; FOT 0213 IF I = 1 THEN DO: FOT 0214 SSB = ‘!’;SSA = ’!’; SSA = SSB!! FOT 0215 REPEAT(SSA, 2)!!’!’; SSF = SSF!!SSA; SSL = SSL!!SSA; FOT 0216 SSA = ’!’!!(67) ’ = ’!!’! !’!!(43) ‘ = ’ !!’!’; FOT 0217 SSB’!’!!(67) ’ ’!!’! !’!!(43) ‘ ’ !!’!’; FOT 0218 SSD = ’!’!!(67) ’ + ’!!’! !’!!(43) ‘ + ’ !!’!’; FOT 0219 SSR = ’!’!!(67) ’*’!!’! !’!!(43) ‘*’ !!’!’; FOT 0220 SOS: FORMAT(COL(2), A); PUT EDIT(SSA, SSB, SSB)(SKIP(8), FOT 0221 X(1), A, 2(COL(2), A)); PUT EDIT( FOT 0222 ‘ФОТОГРАММЕТРИЧЕСКИЕ КООРДИНАТЫ’, FOT 0223 ‘ИЗМЕРЕНИЯ НА СТЕРЕОКОМПАРАТОРЕ’, SSD, SSB, FOT 0224 ‘ОПРЕДЕЛЯЕМЫХ ТОЧЕК (M)’, FOT 0225 ‘ДЛЯ ОПРЕДЕЛЯЕМЫХ ТОЧЕК (MM)’, SSB, SSD)( FOT 0226 SKIP(0), X(4), A(77),A, 2(COL(2), A), SKIP(0), FOT 0227 X(15), A(66), A, 2(COL(2), A)); PUT EDIT(SSF, SSF)(R(SOS)); FOT 0228 PUT EDIT ((‘хфл’, ‘хфп’, ‘уфл’, ‘уфп’, ‘zфл’, ‘zфп’, FOT 0229 SSF, ‘ТОЧКА’, (59) ‘·‘)(SKIP(0), X(12), 6 A(10), COL(2), A, FOT 0230 SKIP(0), X(3), A(7), A); FOT 0231 ЕЕ; FORMAT(SKIP(0), X(80), 3 A(11), A); FOT 0232 IF T = 1 THEN PUT EDIT(‘Xл’, ‘Zл’, ‘Р’, ‘Q’)(R(EEE)); FOT 0233 IF T = 2 THEN PUT EDIT(‘Xл’, ‘Zп’, ‘Р’, ‘Q’)(R(EEE)); FOT 0234 ELSE PUT EDIT(‘Xл’, ‘Zл’, ‘Xп’, ‘Zп’,)(R(EEE)); FOT 0235 PUT EDIT(SSL, SSL, ’X СРЕДНЕЕ’, ‘Y СРЕДНЕЕ’, ‘Z СРЕДНЕЕ’, FOT 0236 SSR)(2(COL(2), A), SKIP(0), X(15), 3 A(20), COL(2),A); END; FOT 0237 XL = Y1 - MO(1); ZL = Y2 - MO(2); XP = Y3 - MO(3); FOT 0238 IF T = 2 THEN DO; ZL = Y4 - MO(4) + ZL; ZP = Y2 - MO(2); END; FOT 0239 IF T = 3 THEN XP = Y1 - XP; IF T = 1 THEN ZP = Y2 - Y4 + MO(4); FOT 0240 IF T = 3 THEN ZP = Y4 - MO(4); FOT 0241 XL = XL - SL(8); ZL = ZL - S(9); XP = XP - SP(8); ZP = ZP - SP(9); FOT 0242 CALL FINA(SL, CL, SP, CP, XXL, XXP, XI, YYL, YYP, YI, ZZL, ZZP, ZI); FOT 0243 WRITE FILE(TABL) FROM(WIWOD); FOT 0244 PUT EDIT(SSF, SSF)(R(SOS)); FOT 0245 PUT EDIT(XXL, XXP, YYL, YYP, ZZL, ZZP)(SKIP(0), F(19,3), 5 F(10,3)); FOT 0246 PUT EDIT(SSF, I, (59)’·’, Y1, Y2, Y3, Y4)(COL(2), A, SKIP(0), FOT 0247 F(8), X(2), A, F(16,3), 3 F(11,3)); FOT 0248 PUT EDIT(SSL, SSL, XI, YI, ZI, SSR)(2(COL(2), A), SKIP(0), F(24,3), FOT 0249 2 F(20,3), COL(2), A); FOT 0250 GO TO WWOD; FINIS; FOT 0251 PUT EDIT(SSA)(R(SOS)); PUT SKIP(3); FOT 0252 CLOSE FILE(TABL); FOT 0253 SSA = ’!’!!(49) ‘ = ’!!’!’; SSB = ’!’!!(49) ’ ‘!!’!’; FOT 0254 SSD = ’!’!!(49) ‘ + ’!!’!’; SSRB = ’!’!!(49) ’*‘!!’!’; FOT 0255 SSL = ’!’!!(49) ‘-’!!’!’; SSF = ’!’!!(13) ’ ‘; FOT 0256 SSF = ’!’!! REPEAT(SSF, 2)!!’!’; FOT 0257 PUT SKIP(3); PUT SKIP(3); FOT 0258 PUT EDIT(SSA, SSB, SSB)(R(SOL)); FOT 0259 PUT EDIT(‘КАТАЛОГ КООРДИНАТ ОПРЕДЕЛЯЕМЫХ ТОЧЕК’)(SKIP(0), FOT 0260 PUT EDIT(SSB, SSR, SSF)(R(SOL)); FOT 0261 PUT EDIT(‘точек’, ‘X’, ‘Y’, ‘Z’, SSD)(SKIP(0), X(8), A(13), FOT 0262 3 A(14), COL(7), A); FOT 0263 OPEN FILE(TABL) INPUT RECORD; FOT 0264 DO J = 1 TO I; FOT 0265 READ FILE(TABL) INTO(WIWOD); FOT 0266 PUT EDIT(SSF, SSF, J, XI, YI, ZI, SSL)(SKIP(0), FOT 0267 X(6), A, COL(7), A, SKIP(0), F(13), F(12,3), 2 F(14,3), COL(7), A); FOT 0268 END; PUT EDIT(SSA)(R(SOL)); PUT SKIP(3); FOT 0269 CLOSE FILE(TABL); FOT 0270 END BLOK; FOT 0271 END FONOGM; FOT 0272 *PROCESS(‘NOL, NA, NT, SKE, FE, 0 = 1, SIZE = 064K’); FOT 0273 PRINT: PROC(DSL, DSP); DCL DSL(*), DSP(*); FOT 0274 DCL(I, J, K) FIXED(2), (L, P)CHAR(1), S(3)CHAR(3), FOT 0275 M FIXED(3), M1 CHAR(6), FOT 0276 (A, B, C1(3), C2(3), C3(3), C4(3))CHAR(67)VAR; FOT 0277 PUT EDIT FOT 0278 ‘!ЭЛЕМЕНТЫ ОРИЕНТИРОВАНИЯ СНИМКОВ !’ FOT 0279 ,’!’, (65) ‘ + ’, ‘!’, FOT 0280 ’!’, ’!’, ’!’, ’!’, ‘ЭЛЕМЕНТЫ ОРИЕНТИРОВАНИЯ’, ‘!’, FOT 0281 ‘ЛЕВЫЙ ПРАВЫЙ !’, ’!’, (65)’·’, ’!’)(SKIP, X(6), FOT 0282 A, COL(7), 3A, COL(7), A(36), 2A(15), A, COL(7), A(6), A(30), A(5), FOT 0283 A, COL(7), 3А); FOT 0284 S(1) = ‘X’; S(2) = ’Y’; S(3) = ’Z’; FOT 0285 ABC: FORMAT(SKIP(0), X(38), A(3), 2 F(15,3)); FOT 0286 ABD: FORMAT(SKIP, X(6), A, COL(7), A); FOT 0287 A = ’!’!!(5) ‘ ’!!’!’!!(14)’ ‘!!’!’!!(14)’ ‘!!’!; FOT 0288 B = ’!’!!(5) ‘-’!!’!’!!(14)’-‘!!’!’!!(14)’-‘!!’!; FOT 0289 С1(2) = !’!!(29) ‘ ’!!A; FOT 0290 С2(1) = ’! КООРДИНАТЫ ЦЕНТРА ПРОЕКЦИИ !!А; FOT 0291 C4(1) = ‘! СНИМКА В ПРОСТРАНСТВЕННОЙ’ !! В; FOT 0292 С2(2) = ’! ГЕОДЕЗИЧЕСКОЙ ИЛИ ‘!!(11)’ ‘!!A; FOT 0293 С4(2) = ’! ФОТОГРАММЕТРИЧЕСКОЙ’ !! (9)’ ‘!!B; FOT 0294 C2(3) = ’! СИСТЕМЕ КООРДИНАТ (М)’ !!А; FOT 0295 C4(3) = ’!’!!(29)’-‘!!B; FOT 0296 DO I = 1 TO 3; PUT EDIT(C1(2), C2(l))(R(ABD)); FOT 0297 PUT EDIT(S(I), DSL(I), DSP(I))(R(ABC); FOT 0298 PUT EDIT(C1(2), C4(I))(R(ABD)); END; FOT 0299 S(1) = ‘ A’; S(2) = ‘ W’; S(3) = ‘ K’; FOT 0300 С1(1) = ’!УГОЛ ОТКЛОНЕНИЯ ОПТИЧЕСКОЙ’ !!А; C1(3), C3(3), C3(2) = C1(2); FOT 0301 С2(1) = ’! ОСИ ФОТОАППАРАТА ОТ ОСИ ‘!!А; FOT 0302 С3(1) = ’! У ПРОСТРАНСТВЕННОЙ С. КООР. ‘!!А; FOT 0303 С2(2) = ’! ПОПЕРЕЧНЫЙ УГОЛ НАКЛОНА ‘!!А; FOT 0304 С2(3) = ’! ПОВОРОТ СНИМКА ‘!!(12)’ ‘!!А; FOT 0305 DO I = 1 TO 3; PUT EDIT(C1(I), C2(I))(R(ABD)); J = 4*I; FOT 0306 PUT EDIT(S(I), (DSL(J + K) DO K = 1 TO 3); (DSP(J + K) DO K = 1 TO 3)) FOT 0307 SKIP(0), X(38), A(3), 2F(8), 2F(3), X(1))); FOT 0308 PUT EDIT(‘!’, ’’’’, ‘"’, ‘!’, ’’’’, ‘"’)(SKIP(0), X(49), 2(2(A(3), A(9))); FOT 0309 L, P = ’-‘; IF DSL(J) = -1 THEN L = ’-‘; IF DSP(J) = -1 THEN P = ’-‘; FOT 0310 M = DSL(J + 1); M1 = M; K = 41 + VERIFY(M1, ‘ ‘); FOT 0311 M = DSP(J + 1); Ml = M; J = 56 - K + VERIFY(M1, ‘ ‘); FOT 0312 PUT EDIT(L, P)(SKIP(0), X(K), A(J), A); FOT 0313 PUT EDIT(C3(I), C4(3))(R(ABD)); END; FOT 0314 S(2) = ’X0’; S(3) = ’Z0’; S(1) = ’F’; FOT 0315 C2(1) = ’! ФОКУСНОЕ РАССТОЯНИЕ СНИМКА (mm)’ !!А; С4(2) = ‘!’ !!(29)’ ‘!!В; FOT 0316 С2(2) = ’! КООРДИНАТЫ ГЛАВНОЙ ‘!!(9)’ ‘!!А; С4(1) = С4(3); FOT 0317 С2(3) = ’! ТОЧКИ СНИМКА (ММ)’ !!А; FOT 0318 DO I = 1 TO 3; PUT EDIT (C1(2), C2(I))(R(ABD)); FOT 0319 PUT EDIT(S(I), DSL(I + 15), DSP(I + 15))(R(ABC)); FOT 0320 PUT EDIT(C1(2), C4(I))(R(ABD)); END; FOT 0321 PUT EDITH(‘!’, (65) ‘ = ’, ‘!’)(SKIP, X(6), 3 A); FOT 0322 RETURN; END PRINT; FOT 0323 *PROCESS(‘NOL, NA, NT, SKE, FE, 0 = l, SIZE = 064K); FOT 0324 GR: PROG (J, G, M, S, R, I); FOT 0325 /* ПРЕОБР. ГРАД. (G), МИН. (M), СЕК. (S) В РАДИАНЫ (R) */ FOT 0326 /* ЕСЛИ I = ’1’B И ОБРАТНОЕ, ЕСЛИ I = ’0’B */ FOT 0327 DCL (Z, O) FLOAT(6); FOT 0328 DCL(G, M, S, R) DEC FLOAT(6), I BIT (1); FOT 0329 PI = 3,1415926; FOT 0330 IF I THEN R = J*(G + (M + S/60,0)/60,0)*PI/180,0; FOT 0331 ELSE DO; J = SIGN(R); Z = 180,0*J*R/RI; G = TRUNC(Z); FOT 0332 Z = (Z - G)*60,0; M = TRUNC(Z); Z = (Z - M)*60,0; FOT 0333 NORM: IF G> = 360 THEN DO; G = G - 360; GO TO NORM; END; FOT 0334 S = TRUNC(Z); END; FOT 0335 RETURN; END GR; FOT 0336 *PROCESS(‘NOL, NA, NT, SKE, FE, 0 = 1, SIZE = 064K’); FOT 0337 HCOS: PROC (A, W, K, C); FOT 0338 DCL(A, W, K, C(*)) FLOAT(6); FOT 0339 DCL (CA, SA, CW, SW, CK, SK) FLOAT (6); FOT 0340 CA = COS(A); SA = SIN(A); FOT 0341 CW = COS(W); SW = SIN(W); CK = COS(K); SK = SIN(K); FOT 0342 C(1) = CA*CK - SA*SW*SK; C(2) = SA*CW; C(3) = -CA*SK - SA*SW*CK; FOT 0343 C(4) = -SA*CK - CA*SW*SK; C(5) = CA*CW; C(6) = SA*S*K - CA*SW*CK; FOT 0344 C(7) = CW*SK; C(8) = SW; C(9) = CW*CK; RETURN; END HCOS; FOT 0345 *PROCESS(‘NOL, NA, NT, SKE, FE, 0 = 1, SIZE = 064K); FOT 0346 SIST: PROC (SP, CP, XSP, ZSP, X, Y, Z, XPT, ZPT, F, N, N2); FOT 0347 DCL SP(*), CP(*), XSP(*), ZSP(*), X(*), Y(*), FOT 0348 N FIXED(3), N2 FIXED(3), FOT 0349 Z(*), XPT(*), ZPT(*), F(*); FOT 0350 DCL (M, Ml, M2, M4, NL, NP, NN, N1) FIXED(3) EXIT; FOT 0351 DCL (I, K, J, L) FIXED(3), SS DEC(12), FOT 0352 W(M2), W1(M2), RAT(N2, M), A(N1), FF(N2); FOT 0353 KOEF: PROC (C, S, XS, ZS, X, Y, Z); FOT 0354 DCL C(*), S(*); FOT 0355 DCL (XX, YY, ZZ, XYZ, SS, BA, T) FLOAT(6); FOT 0356 XX = X - S(1); YY = Y - S(2); ZZ = Z - S(3); FOT 0357 XYZ = 1/(C(2)*XX + C(5)*YY + C(8)*ZZ); SS = XS - S(8); FOT 0358 BA = C(5)*XX - C(2)*YY; T = (SW - ZZ*XYZ)/CW; FOT 0359 W(1) = XYZ*(C(2)*SS - C(1)*S(7)); W(2) = XYZ*(C(5)*SS - C(4)*S(7)); FOT 0360 W(3) = XYZ*(C(8)*SS - C(7)*S(7)); W(5) = SS*T - S(7)*SK; FOT 0361 W(4) = XYZ*(S(7)*(C(4)*XX - C(2)*YY) - SS*BA); FOT 0362 W(7) = SS/S(7); W1(6) = -SS; SS = ZS - S(9); W(6) = SS; W1(7) = SS/S(7); FOT 0363 W1(1) = XYZ*(C(2)*SS - C(3)*S(7)); W1(2) = XYZ*(C(5)*SS - C(6)* FOT 0364 S(7)); W1(3) = XYZ*(C(8)*SS - C(9)*S(7)); W1(4) = XYZ*(C(6)*XX*S(7) - FOT 0365 S(7)*C(3)*YY - SS*BA); W1(5) = SS*T - S(7)*CK; RETURN; END KOEF; FOT 0366 SW = SIN(SP(5)); CW = COS(SP(5)); SK = SIN(SP(6)); CK = COS(SP(6)); FOT 0367 K = 1; J = 2; DO I = 1 TO N; IF N = NP^I>NN THEN L = NL - NN + I; ELSE L = I; FOT 0368 CALL KOEF(CP, SP, XSP(I), ZSP(I), X(L), Y(L), Z(L)); FOT 0369 DO L = 1 TO M2; RAT(K, L) = W(L); RAT(J, L) = W1(L); END; FOT 0370 RAT(K, M4), RAT(J, M) = 1; RAT(K, M); RAT(J, M4) = 0; FOT 0371 FF(K) = XSP(I) - XPT(I) - SP(8); FF(J) = ZSP(I) - ZPT(I) - SP(9); FOT 0372 K = K + 2; J = J + 2; END; FOT 0373 L = 0, DO I = 1 TO M; DO J = 1 TO M; SS = 0; FOT 0374 DO K = 1 TO N2; SS = SS + PAT(K, I)*RAT(K, J); END; FOT 0375 L = L + 1; A(L) = SS; END; SS = 0; DO K = 1 TO N2; FOT 0376 SS = SS + RAT(K, I)*FF(K); END; F(I) = SS; END; FOT 0377 CALL RSY (M, F, A); FOT 0378 SP = SP + F; FOT 0379 RETURN; END SIST; FOT 0380 *PROCESS (‘NOL, NA, NT, SKE, FE, 0 = 1, SIZE = 064K’); FOT 0381 RSY: PROCEDURE (N, F, A); FOT 0382 /* РЕШЕНИЕ СИСТЕМЫ ЛИНЕЙНЫХ АЛГЕБРАИЧЕСКИХ УРАВНЕНИЙ */ FOT 0383 /* С СИММЕТРИЧНОЙ МАТРИЦЕЙ МЕТОДОМ КВАДРАТНЫХ КОРНЕЙ */ FOT 0384 /* N - ПОРЯДОК: F(N) - ПРАВАЯ ЧАСТЬ. ТАМ ЖЕ РЕШЕНИЕ; */ FOT 0385 /* A(N*(N + 1)/2) - МАТРИЦА, ЗАПИСАННАЯ ВЕРХ. ТРЕУГ. ПО СТРОКАМ */ FOT 0386 DCL N FIXED(3, (F(*), A(*), V(N)) FLOAT (6), FOT 0387 (I, S, R, P, P1, J, T, L)FIXED(4), (S1, S2, B)FLOAT(12); FOT 0388 DO I = 1 TO N; V(I) = 1; END; FOT 0389 S = 1; R = NP, P1 = 0; FOT 0390 DO I = 1 TO N; FOT 0391 IF S = 1 AA(S) = 0 THEN DO; P1 = 1; GO TO MET1; END; FOT 0392 DO J = 0 TO N - I; S1, S2 = 0, T = I; FOT 0393 DO L = l TO I - 1; B = A(T)*V(L); S1 = S1 + B*A(T + J); FOT 0394 S2 = S2 + B*F(L); T + N - L; END; A(S + J) = A(S + J) - S1; FOT 0395 IF J = 0 THEN DO; FOT 0396 IF ABS(A(S)) = 0 THEN DO; P1 = 1; GOTO MET1; END; FOT 0397 IF A(S) <0 THEN DO; V(I) = -1; P = 1; END; FOT 0398 A(S) = SQRT(A(S)*V(I)); FOT 0399 END; ELSE A(S + J) = A(S + J)/A(S)*V(I); FOT 0400 END; F(I) = F(I) - S2)/A(S)*V(I); S = S + R; R = R - 1; FOT 0401 END; S = N*(N + 1)/2; R = 1; FOT 0402 DO I = N BY -1 TO 1; S1 = 0; FOT 0403 DO L = 1 TO N - I; S1 = S1 + F(I + L)*A(S + L); END; FOT 0404 F(I) = (F(I) - S1)/A(S);R = R + 1;S = S - R; FOT 0405 END; MET1: IF P1 = 1 THEN DO; FOT 0406 PUT EDIT(‘ОБРЫВ ПРОЦЕССА, МАТРИЦА НЕ ПОЛОЖИТЕЛЬНО ОПРЕДЕЛЕННАЯ’ FOT 0407 )(SKIP(2), A); STOP; END; FOT 0408 RETURN; END; RSY; FOT 0409 *PROCESS (‘NOL, NA, NT, SKE, FE, 0 = 1, SIZE = 064K’); FOT 0410 FINA: PROC(SL, CL, SP, CP, X1, X2, XI, Y1, Y2, YI, Z1, Z2, ZI); FOT 0411 DCL SL(*), SP(*), CL(*), CP(*); FOT 0412 DCL(XL, ZL, XP, ZP) EXT; FOT 0413 DCL(BC, BS) EXT; FOT 0414 R = SL(7)/(CL(4)*XL + CL(5)*SL(7) + CL(6)*ZL); FOT 0415 TXL = R*(CL(1)*XL + CL(2)*SL(7) + CL(3)*ZL); FOT 0416 TZL = R*(CL(7)*XL + CL(8)*SL(7) + CL(9)*ZL); FOT 0417 R = SL(7)/(CP(4)*XP + CP(5)*SP(7) + CP(6)*ZP); FOT 0418 TXP = R*(CP(1)*XL + CP(2)*SP(7) + CP(3)*ZP); FOT 0419 TZP = R*(CP(7)*XL + CP(8)*SP(7) + CP(9)*ZP); FOT 0420 PT = TXL - TXP; FOT 0421 R = (BC - BS*TXP/SL(7))/PT; FOT 0422 X1 = SL(1) + R*TXL; Y1 = SL(2) + R*SL(7); Z1 = SL(3) + R*TZL; FOT 0423 R = (BC - BS*TXL/SL(7))/PT; FOT 0424 X2 = SP(1) + R*TXP; Y2 = SP(2) + R*SL(7); Z2 = SP(3) + R*TZP; FOT 0425 XI = (X1 + X2)/2; YI = (Y1 + Y2)/2; ZI = (Z1 + Z2)/2; FOT 0426 RETURN; END; FINA; FOT 0427 /* FOT 0428 //GO. TABL DD DSN = &&FILE, FOT 0429 //DCB = (RECFM = FB, LRECL = 12, BLKSIZE = 120), FOT 0430 //DISP = (NEW, DELETE), UNIT = SYSDA, SPACE = (120, (40, 15)), FOT 0431 // VOL = SER = PTOMO1 FOT 0432 //GO. SYSIN DD* FOT 0433 3 FOT 0434 6,7 FOT 0435 5 FOT 0436 0’01 9 FOT 0437 100 1 2 -1 1 3 20 1 5 30 30 1 2 10 15 210 4 3 FOT 0438 150 12 4 -1 6 30 35 -1 4 20 21 -1 2 50 45 170 4 -3.25 FOT 0439 98 98 99 99 FOT 0440 71.656 186.59 69.498 187.914 74.131 227.819 FOT 0441 150.79 141.993 80.118 78.351 157.705 144.988 FOT 0442 -3.028 104.557 0.101 105.546 -55.75 -51.104 101.789 FOT 0443 161.204 166.758 101.422 102.956 167.988 101.812 104.148 FOT 0444 100 145 100 145 100 145 100 145 FOT 0445 70 70 70 70 50 50 50 50 FOT 0446 25 25 0 0 20 20 1 1 FOT 0447 70.3775 108.9165 -1.1351 125.0388 FOT 0448 125.748 146.6499 43.0799 163.584 FOT 0449 187.3757 104.2363 105.1556 128.1402 FOT 0450 125.3223 79.285 45.3268 102.08 FOT 0451 72.9296 161.6167 -24.9247 171.2272 FOT 0452 204.0063 150.3346 102.8353 178.718 FOT 0453 206.0909 77.6514 104.0656 101.937 FOT 0454 70.4606 79.6176 -20.6893 100.1941 FOT 0455 72.9889 118.9962 -53.278 132.782 FOT 0456 147.3779 169.3027 9.1697 190.4972 FOT 0457 229.1389 111.3622 101.2167 138.2056 FOT 0458 148.2072 77.8559 13.5208 99.2557 FOT 0459 196.6399 133.8559 -80.0569 159.5602 FOT 0460 /* FOT 0461 // Состав и форма представления входной информации 35. Согласно требованиям оператора GET LIST алгоритмического языка PL/1, данные должны перфорироваться на карты в следующем виде: в десятичном числе вместо запятой используется точка: например, число 3,4182 нужно перфорировать в виде 3.4182; одно число от другого отделяется пропуском (пробелом) или запятой: например, 3.12, 81.51, -41.02; пробелы внутри числа не попускаются; данные перфорируются на карту с 1-й по 80-тую колонку перфокарты (по ГОСТ 6198-75) в непрерывном потоке; 36. Порядок следования данных должен быть такой, как описано ниже. 1. Кодовое число типа измерительного прибора (может быть 1, 2 или 3). 2. Количество контрольных точек левого снимка. 3. Количество контрольных точек правого снимка. 4. Количество общих контрольных точек. 5. Точность вычислений элементов ориентирования левого и правого снимков в итерационном процессе. 6. Максимальное количество итераций при вычислениях элементов ориентирования снимков. 7. 15 параметров, относящихся к левому снимку (массив DSL). 8. 15 параметров, относящихся к правому снимку (массив DSP). 9. Места нулей шкал стереокомпаратора (4 числа): если T = 1, то (MOxЛ, MOzЛ, MOp, MOq); если T = 2, то (MOxЛ, MOzП, MOp, MOq); если T = 3, то (MOxЛ, MOzЛ, (MOxП, MOzП); 10. Измерения на стереокомпараторе для nЛ контрольных точек в алгоритме обозначено x"Л. В программе массив X1 из NL чисел. 11. Измерения на стереокомпараторе для всех nЛ контрольных точек в алгоритме обозначены для T = 1,3 - z"Л, для T = 2 - z"П. В программе обозначен массив Х2 из NL чисел. 12. Измерения на стереокомпараторе для всех nП контрольных точек в алгоритме обозначены для T = 1,2 - p", для T = 3 - x"П. В программе массив X3 из NP число. 13. Измерения на стереокомпараторе для nП контрольных точек в алгоритме обозначены для T = 1,2 - q", для T = 3 - z"П. В программе массив X4 из NP точек. 14. Пространственные фотограмметрические координаты X для n контрольных точек в алгоритме и программе обозначены через массив X из N чисел. 15. Пространственные фотограмметрические координаты Y для n контрольных точек в алгоритме и программе обозначены через массив Y из N чисел. 16. Пространственные фотограмметрические координаты Z для n контрольных точек в алгоритме и программе обозначены через массив Z из N чисел. Примечание к пп. 10 - 16. Общие контрольные точки (n' значений) должны следовать первыми в массивах X1 - X4, X, Y, Z. 17. Измерения на стереокомпараторе для одной определяемой точки - четыре числа, в программе они обозначены Y1, Y2, Y3, Y4. Для обработки всех определяемых точек необходимо повторить п. 17 столько раз, сколько определяемых точек. Состав и форма представления выходной информации Состав пакета заданий Для ЭВМ серии ЕС, работающих под сопровождением операционной системы ОС, возможны три режима работы: PCP, MFT и MVT. Для конкретизации заданий рассмотрим режим PCP: 1. // шифр пользователя из 8 символов: -jOB- MSGLEVEL = (2, 0); 2. // STP-EXEC-PL1LFCG FARM. PL1L = 'NOL, NA, NT, SKE; SIZE = 999999, 3. // 4 FARM. GO = 'SIZE = 0170 K'; 4. // 4 COND = EVEN; 5. // PL1L, SYSIN DD*; FOTOGM: PROC OPTIONS (MAIN); END FOTOGM; 6. * PROCESS (NOL, NA, NT, SKE, FE, 0 = 1, SIZE = 064K); PRINT: PROC (DSL, DSP); END PRINT. 39. Состав пакета заданий для записи программы в библиотеку на магнитном диске С целью дальнейшего использования удобно записать программу в сохраняемую библиотеку FOT в виде загрузочного модуля, расположенного на диске PTOMO1. 1. // шифр пользователя из 8 символов: -jOB- MSGLEVEL = (2, 0); 2. // STP-EXEC-PL1LFCL, FARM. PL1L = 'NOL, NA, NT, SKE, SIZE = 999999, 0 = 2'; 3. //PL1L, SYSlN-DD-*; исходные модули с картами *PROCESS как в п. 38. 4./* 5. // LKED. SYSLMOD-DD-DSN = FOT; 6.// 4 DlSP = (NEW, KEEP), UNIT = SYSDA, VOL = SER = PTOM 01; 7. //4 SPACE = (1024, (50, 10, 10)); 8. // LKED. SYSIN-DD-*; 9. 7 NAME-FOTOGM (R); 10. /*; 11. // PC-EXEC-PGM = IEHLIST; 12. // SYSPRINT-DD-SYSOUT = A; 13. // DD1-DD-UNIT = SYSDA, DISP = OLD; 14. // 7 VOL = SER = PCP 064; 15. // DD2-DD-UNIT = SYSDA, DISP = OLD; 16. // 7 VOL = SER = RTOM 01; 17. // SYSIN-DD-*; 18. -LlSTPDS-DSNAME = FOT, VOL = 5050 PTOM 01; 19. /*; 20. //. Управляющие карты с 11 по 19 служат для контроля (распечатки библиотеки FOT). 40. Состав пакета заданий для использования программы, записанной в библиотеке ЭВМ. Для использования загрузочного модуля FOTOGM записанного в библиотеку FOT, необходимо составить следующий пакет задания: 1. // шифр -JOB-MSGLEVEL = (2, 0); 2. // STEPLIB-DD-DSN = FOT, DISP = OLD, UNIT = SYSDA, VOL = SEP = RTOM 01; 3. // 8-DD-DSN = SYS1. PL1LIB, DISP = SHR; 4. // GO-EXEC-PGM = FOTOGM; 5. // SYSPRINT-DD-SYSOUT = A; 6. // TABL-DD-DSN = && FILE; 7. // 4 DCB = (RECFM = FB, LRECL = 12, BLKSIZE = 120); 8. // 4 DISP = (NEW, DELETE), UNIT = SYSDA, SPACE = (120, (40,15)); 9. // 4 VOL = SER = PTOM 01; 10. // SYSIN-DD-*; данные 11. /*; 12. //. Инструкция оператору для работы с программой 41. Для работы программы необходимы системные устройства ЭВМ стандартной конфигурации. Для счета по приведенной программе необходимо подготовить исходные данные согласно п.п. 35 и 36. Составить пакет перфокарт по п. 38 и пропустить на машине в режиме пакетной обработки. Счет по программе для одной определяемой точки на ЭВМ М-4030 продолжается около 1 с. Контрольный пример с учетом трансляции ОРТ-1 и редактирования на ЭВМ М-4030 продолжается около 8 мин. Контрольная тестовая задача 42. Описание тестовой задачи Тестовая задача составлена по макетным снимкам, когда координаты контрольных точек на объекте и координаты точек на снимках взяты безошибочными; поэтому при отладке программы совпадение вычисленных значений координат с исходными обеспечивается с точностью не менее 0,001 м для пространственных координат объекта и 0,001 мм для координат на снимке. Обратная задача решалась в приводимом примере по первым пяти контрольным точкам. Остальные использованы для контроля решения задачи. 43. Исходная информация контрольного примера. Исходная информация готовится на перфокартах в последовательности, описанной в пп. 35 и 36 и размещается после управляющей перфокарты 17 (см. п. 38) перед управляющей перфокартой 18. Вариант подготовки информации: 1 перфокарта: 3 (код, число - T). 2 перфокарта: 6 7 (число контрольных точек - NL, NP. 3 перфокарта: 5 (число общих контрольных точек - NN. 4 перфокарта: 0.01, 9 (число EPS, количество итераций KOLI). 5 перфокарта: 100 1 2 -1 1 3 20 1 5 30 30; 1 2 10 15 210 4 3 (массив DSL). 6 перфокарта: 150 12 4 -1 6 30 35 -1 4 20 21; -1 2 50 45 170 4 -3.25 (массив DSP). 7 перфокарта: 98,98,99,99 (массив MO).). 8 перфокарта: 71.6561 186.59 69.4981 187.9144 74.1315 227.8194 (массив X1). 9 перфокарта: 150.7902 141.993 80.1179 78.3511 157.7053 144.9881 (массив X2). 10 перфокарта: -3.0279 104.557 101 105.5459 -55.7499; -51.1036 101.789 (массив X3). 11 перфокарта: 161.2036 166.7577 101.4219 102.9562 167.9879 101.8123 104.1473 (массив X4) 12 перфокарта: 100, 145, 100, 145, 100, 145, 100, 145 (массив X). 13 перфокарта: 70, 70, 70, 70, 50, 50, 50, 50 (массив Y); 14 перфокарта: 25, 25, 0, 0, 20, 20, 1, 1 (массив Z) 15 перфокарта: 70.377 108.916 -1.135 125.039 (1-я опред. точка). 16 перфокарта: 125.748 146.65 43.08 163.584 (2-я опред. точка). 17 перфокарта: 187.376 104.236 105.156 128.14 (3-я опред. точка). 18 перфокарта: 125.322 79.285 45.327 102.08 (4-я опред. точка). 19 перфокарта: 72.93 161.617 -24.925 171.227 (5-я опред. точка). 20 перфокарта: 204.006 150.335 102.835 178.718 (6-я опред. точка). 21 перфокарта: 206.91 77.651 104.066 101.937 (7-я опред. точка). 22 перфокарта: 70.461 70.018 -20.689 100.194 (8-я опред. точка). 23 перфокарте: 72.989 118.996 -53.278 132.782 (9-я опред. точка). 24 перфокарта: 147.878 169.303 9.17 190.497 (10-я опред. точка). 25 перфокарта: 229.139 111.362 101.217 138.206 (11-я опред. точка). 26 перфокарта: 148.207 77.856 13.521 99.256 (12-я опред. точка) 27 перфокарта: 196.64 133.856 -80.057 159.56 (13-я опред. точка). Контрольная тестовая задача 44. Входная информация
Приближенные элементы ориентирования снимков
Измерения на стереокомпараторе для контрольных точек, мм
Измеренные фотограмметрические координаты контрольных точек, м
45. Выходная информация
РЕШЕНИЕ НАЙДЕНО Полученные элементы ориентирования снимков
Фотограмметрические вычисленные координаты контрольных точек, отклонение исходных от вычисленных, м
Каталог координат определяемых точек
Приложение 5ОБРАЗЕЦ ОФОРМЛЕНИЯ ГРАФИЧЕСКОГО ПЛАНА ФАСАДА
Рис. 17 СОДЕРЖАНИЕ
Вернуться в "Каталог СНиП"
Источник информации: https://internet-law.ru/stroyka/text/11280/
На эту страницу сайта можно сделать ссылку:
На правах рекламы: |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
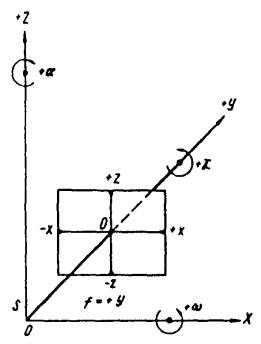
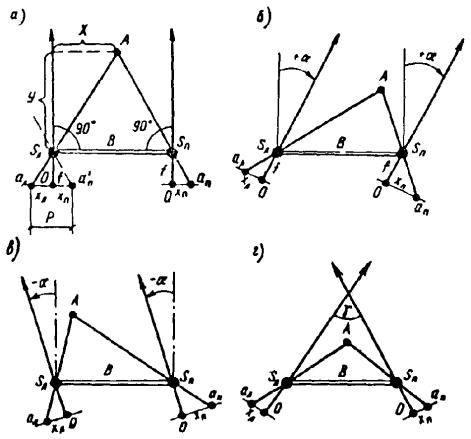
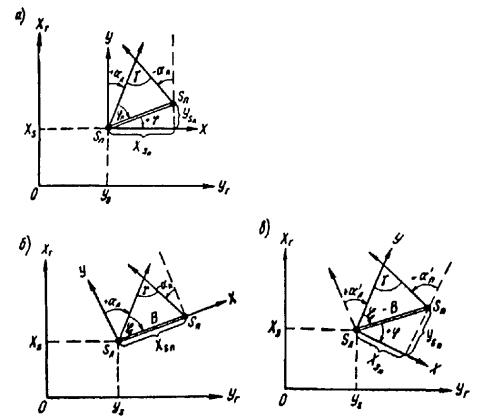









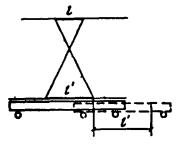

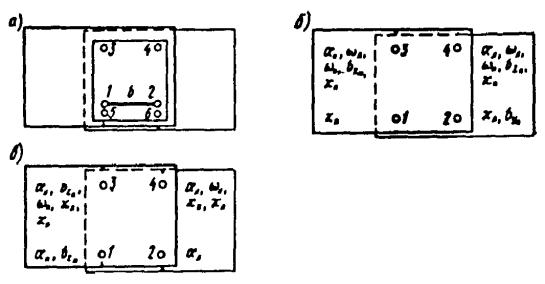

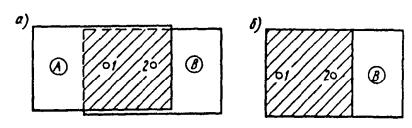

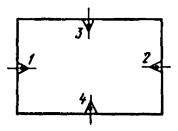
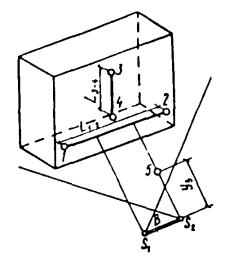


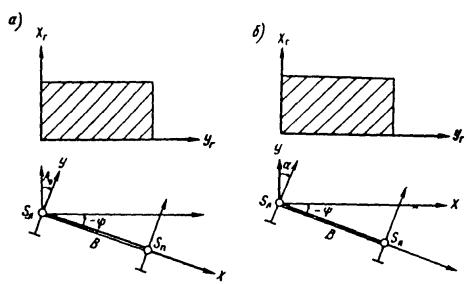


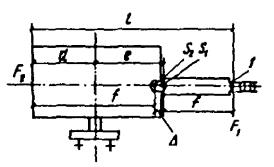
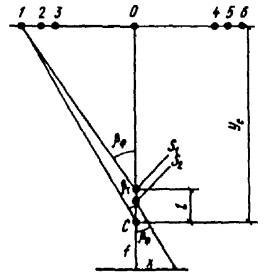

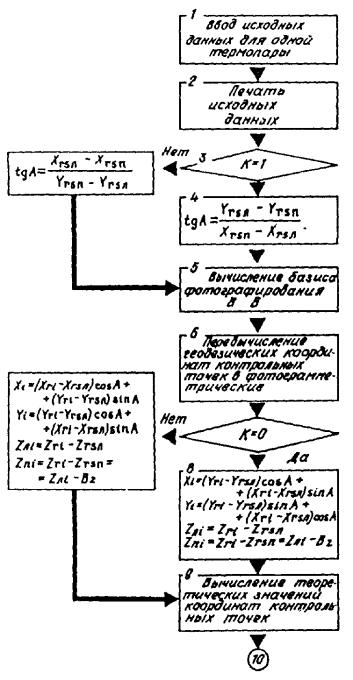
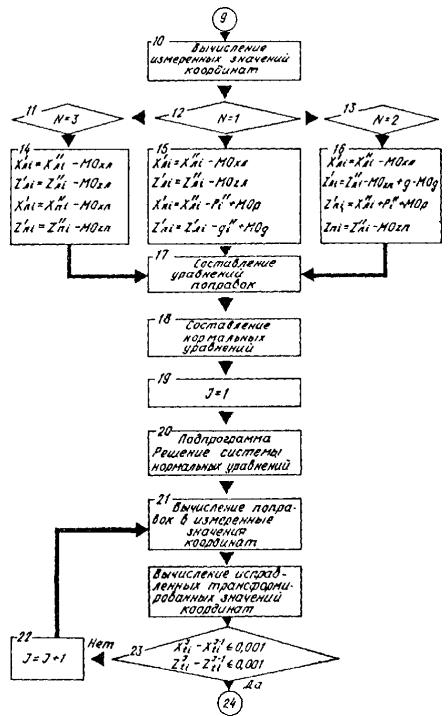
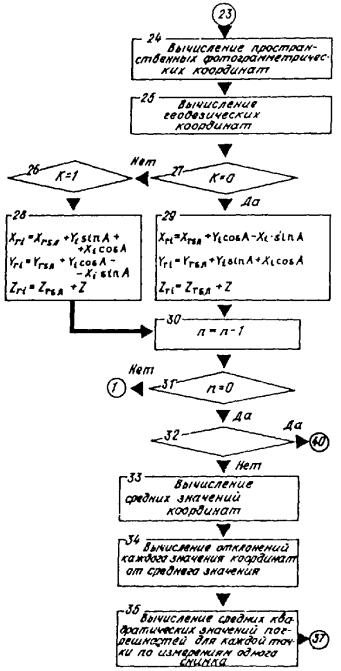
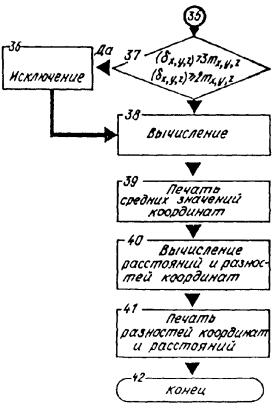
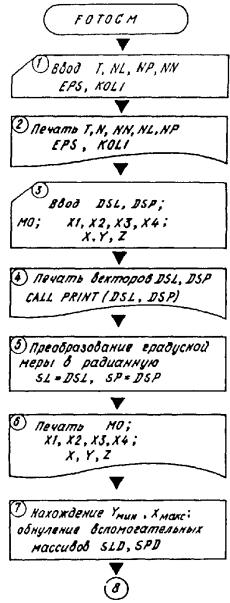
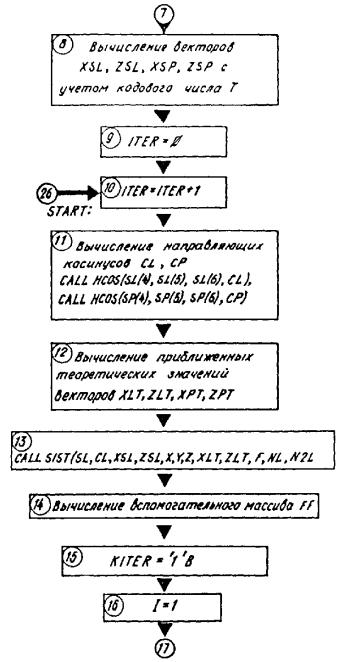
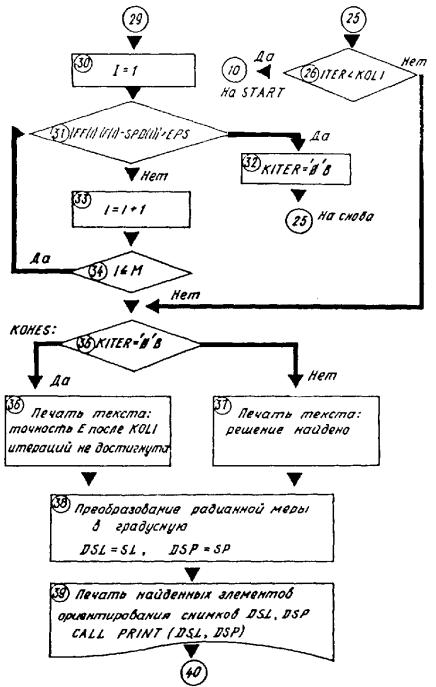
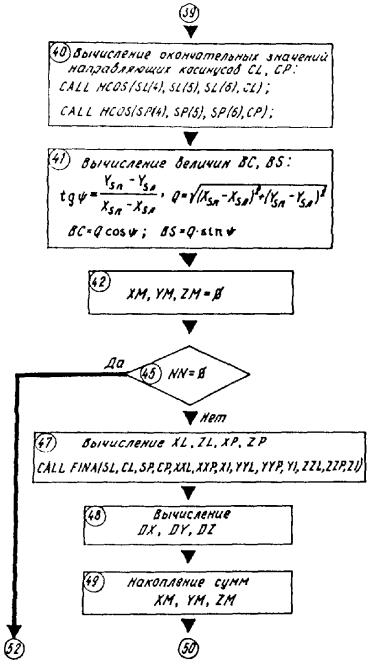
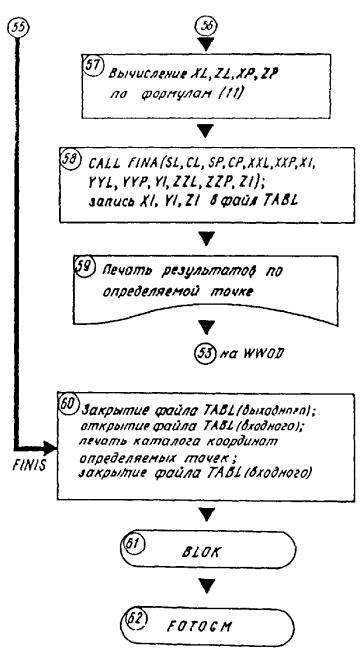
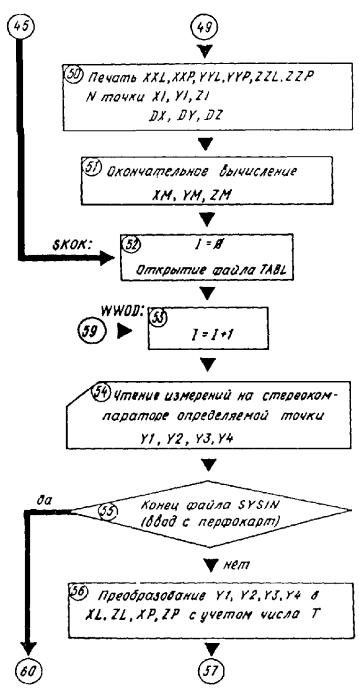
|
© Антон Серго, 1998-2024.
|
Разработка сайта |
|